





























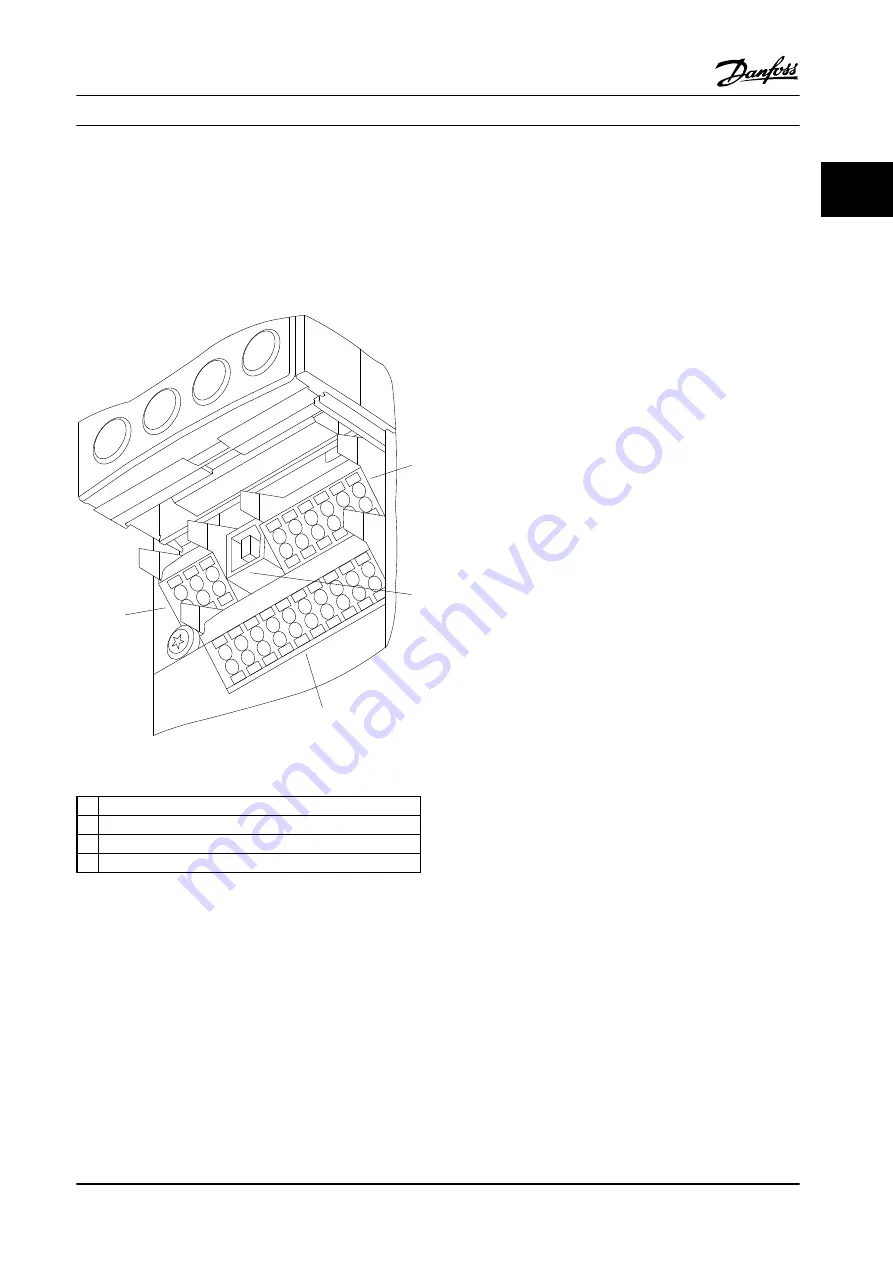
The third way is through signal wiring connected to the
adjustable frequency drive control terminals. See
. The adjustable frequency drive control
terminals are located below the adjustable frequency drive
LCP. Improperly connected control wiring can be the cause
of a motor not operating or the adjustable frequency drive
not responding to a remote input.
1
4
2
3
130BA012.12
61
68
69
39
42
50
53
54
55
12
13
18
19
27
29
32
33
20
37
Figure 2.15 Control Terminals
1
Digital I/O terminals
2
RS 485 (EIA-485) terminal
3
Analog I/O terminals
4
USB connector
Table 2.5 Legend to
Terminal Descriptions
2.6.1 Input signals
The adjustable frequency drive can receive two types of
remote input signals: digital or analog. Digital inputs are
wired to terminals 18, 19, 20 (common), 27, 29, 32, and 33.
Analog inputs are wired to terminals 53 or 54 and 55
(common). The terminal functions are set by a switch
found by removing the LCP. Some options include
additional terminals for input signals.
Analog signals can be either voltage (0–10 V DC) or
current (0–20 mA or 4–20 mA). Analog signals can be
varied like dialing a rheostat up and down. The adjustable
frequency drive can be programmed to increase or
decrease output in relation to the amount of current or
voltage. For example, a sensor or external controller may
supply a variable current or voltage. The adjustable
frequency drive output, in turn, regulates the speed of the
motor connected to the adjustable frequency drive in
response to the analog signal.
Digital signals are a simple binary 0 or 1 which act as a
switch. A 0–24 V DC signal controls the digital signals. A
voltage signal lower than 5 V DC is a logic 0. A voltage
higher than 10 V DC is a logic 1. 0 is open, 1 is closed.
Digital inputs to the adjustable frequency drive are
switched commands such as start, stop, reverse, coast,
reset, and so on. (Do not confuse these digital inputs with
serial communication formats where digital bytes are
grouped into communication words and protocols.)
The RS 485 serial communication connector is wired to
terminals (+) 68 and (-) 69. Terminal 61 is common and is
sometimes used for terminating shields when the control
cable is run between multiple adjustable frequency drives,
not other devices. See
chapter 2.9 Grounding Shielded
for correct methods for terminating a shielded
control cable.
2.6.2 Output signals
The adjustable frequency drive also produces output
signals that are carried through either the RS-485 serial bus
or terminal 42. Output terminal 42 operates in the same
manner as the inputs. The terminal can be programmed
for either a variable analog signal in mA or a digital signal
(0 or 1) in 24 V DC. In addition, a pulse reference can be
provided on terminals 27 and 29. Output analog signals
generally indicate the adjustable frequency drive
frequency, current, torque, and so on, to an external
controller or system. Digital outputs can be control signals
used to open or close a damper, for example, or send a
start or stop command to auxiliary equipment.
Additional terminals are Form C relay outputs on terminals
01, 02, and 03, and terminals 04, 05, and 06.
Operator Interface and Adju...
Service Manual
MG94A222
Danfoss A/S © Rev. 2014-02-10 All rights reserved.
29
2
2
Summary of Contents for VLT FC 103
Page 2: ......







































































