





























1-11
Section 1 Introduction
Brooks
®
Digital MFC's & MFM's
Installation and Operation Manual
X-TMF-SLA5800-Series-RevB-MFC-eng
Part Number: 541B187AAG
January, 2017
EtherCAT Communications
Brooks lnstrument now introduces the state-of-the-art EtherCAT
communications interface on its SLA Enhanced Series platform.
Many applications of Flow Controllers/Meters are moving to increase the
use of automation. Automation comes in many forms including Ethernet
based field buses. Digital communications from these varied systems and
the devices they measure and control, are a very effective means of not
only accomplishing more effective and rapid system integration, but also
providing greatly improved system diagnostics and maintainability.
EtherCAT is an Ethernet based communication system and is known for its
high cycle time and cost efficient cabling and master application solutions.
The available physical interfaces on the EtherCAT device are listed below:
• 5 pin M8 threaded male connector for power and Analog l/O, indicated by “pwr”.
• ln and Out ports with RJ-45 connectors.
• 2.5mm female jack for RS485 diagnostic port indicated by “DlAG” (refer
to the SLA 5800 Series installation and operation manual for more details)
The EtherCAT communication option supports the following message types:
• Cyclic data exchange (Read/Write data)
• Read lnputs (e.g. status, flow, temperature, actuator drive value, etc.)
• Read Outputs (e.g. commands, setpoint, actuator override, etc.)
• Read Diagnostics information (warning & alarm status)
• Check Device configuration
• Calibration due status
• Hardware/Software versions etc.
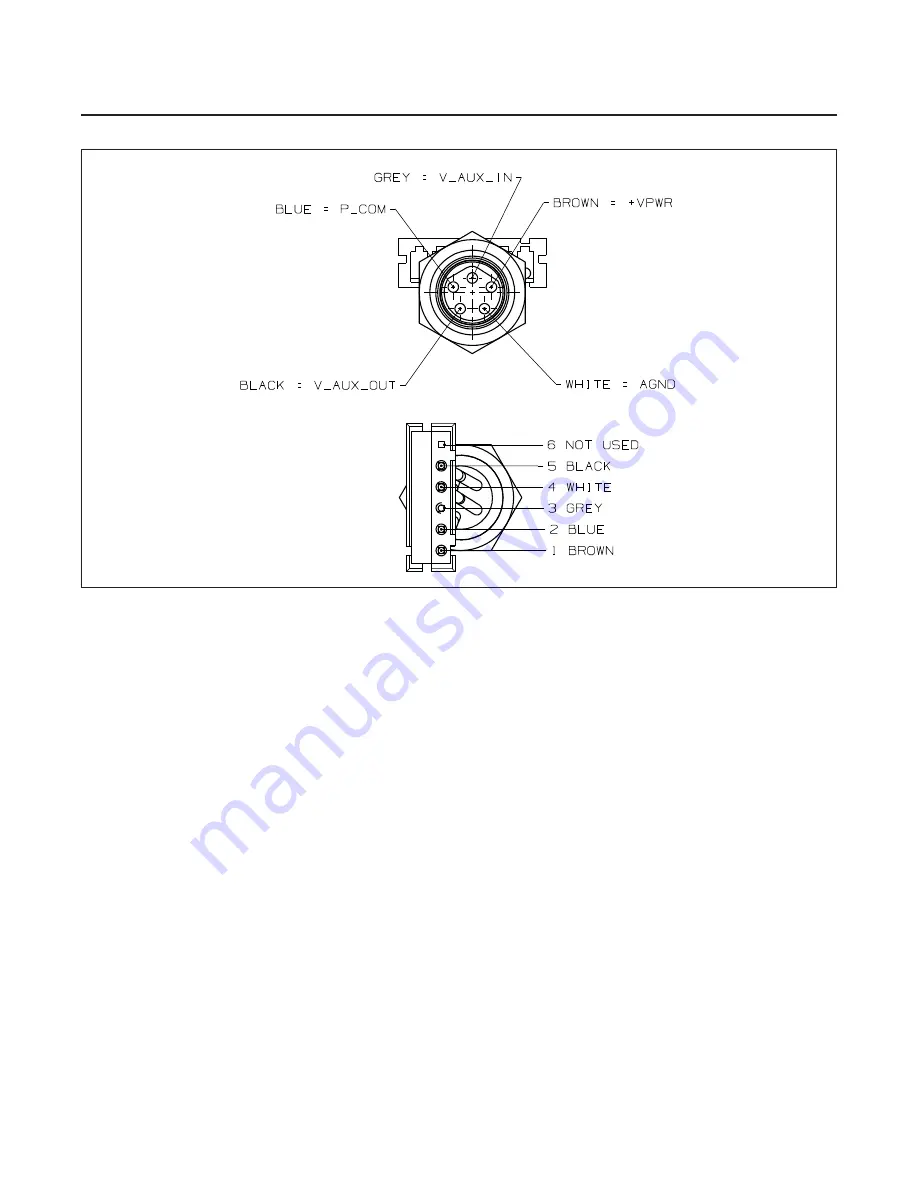
Figure 1-7 SLA5800 Series EtherCAT Connection and Pinouts







































































