





























ECODRIVE DKC02.1 Drive Controller
BZM auxiliary bleeder module
5-3
DOK-ECODRV-DKC02.1****-PRJ2-EN-P
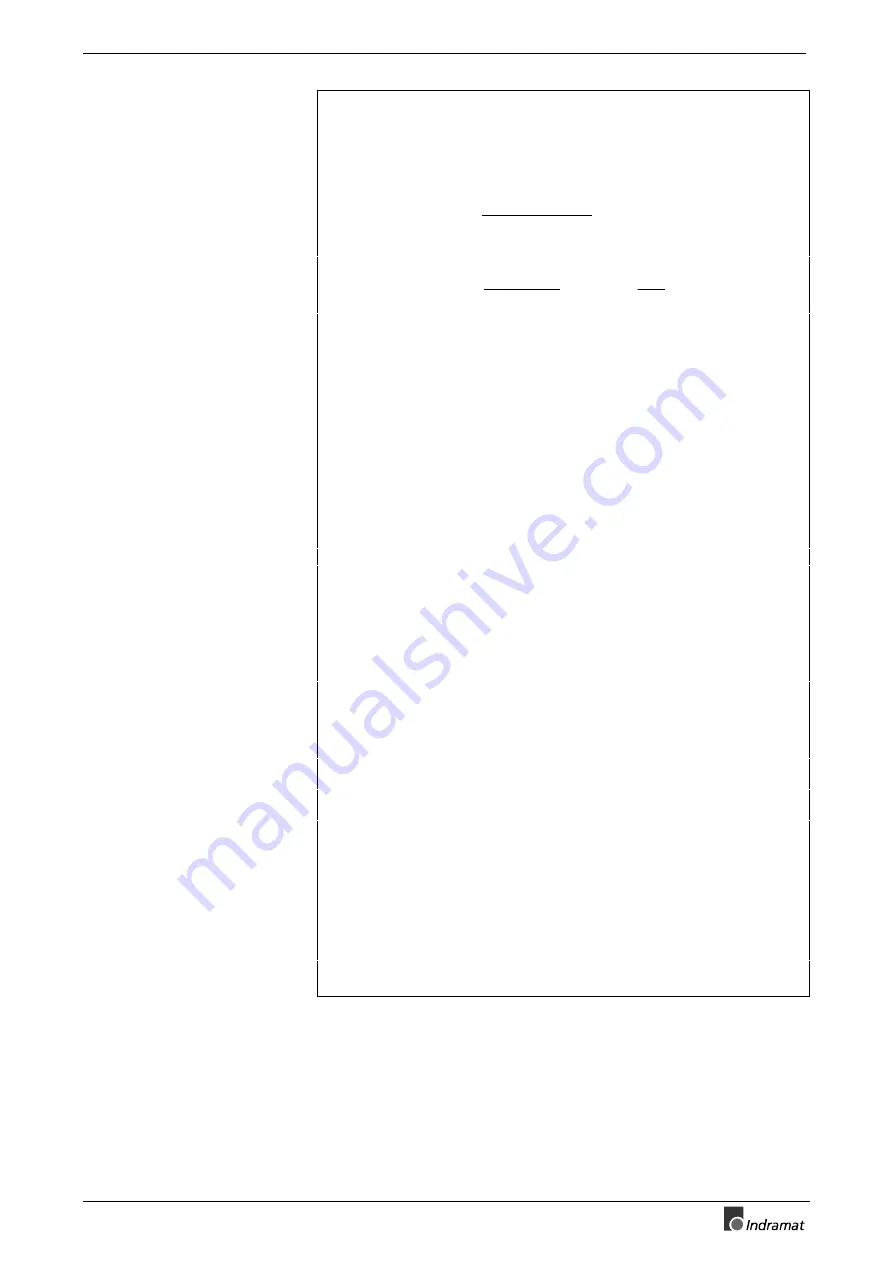
1. Continuous regenerative power
P
P
RD
BD,DKC
∑
∑
≤
0 8
,
*
P
W
W
t
RD
rot +
pot
z
=
∑
∑
* 1000
W
n
z
J
J
Last
M
rot
2
Nutz
dec
=
⋅
⋅
⋅
⋅
+
2
60
2
π
W
g h z
pot
= m
last ab
⋅ ⋅ ⋅
2. Peak regenerative power
DKC
BM,
*
RS
8
,
0
P
P
≤
∑
s
servodrive
the
for
lists
Selection
see
>
-
RS
P
3. Regenerative energy (a single braking in the E-stop position)
∑
∑
∑
≤
DKC
max,
max
rot,
max
pot,
W
*
8
,
0
W
+
W
DKC
Data
Technical
Fig.
see
>
-
DKC
max,
W
P
RD
:
continuous regenerative power from the mechanical system
generated in continuous operation in kW
P
BD, DKC
:
continuous regenerative power that the drive controller can
process in continuous operation in kW
P
RS
:
peak regenerative power in kW
W
rot
:
rotary energy in Ws
W
pot
:
potential energy in Ws
W
rot, max
:
max. occurring rotary energy in the E-stop position in Ws
W
pot, max
:
max. occurring potential energy in the E-stop position in Ws
t
z
:
cycle time in s
J
Last
:
load torque in kgm²
J
M
:
motor inertia, in kgm²
m
Last
:
load weight in kg
W
max, BZM
:
storable energy in BZM 01.1 in kWs
W
max, DKC
:
storable energy in the DKC in kWs
g: 9.81
ms²
h:
lowering dimension in m or number of braking actions
n
Nutz
:
motor speed used in min
-1
z
ab
:
number of drops per cycle
z
dec
:
number of braking actions per cycle
Fig. 5-2:
Check the conditions for regenerative power and regenerative energy
with several DKCs connected via the DC bus
up to 6 DKCs
LSA Control S.L. www.lsa-control.com [email protected] (+34) 960 62 43 01







































































