





























146
[1.7 APPLICATION FUNCT.]
(FUn-)
PID feedback supervision
Used to define the operating mode in the event of detection of a PI feedback:
• Lower than the limit set if
[PID correct. reverse]
(PIC)
=
[No]
(nO)
• Higher than the limit set if
[PID correct. reverse]
(PIC)
=
[Yes]
(YES)
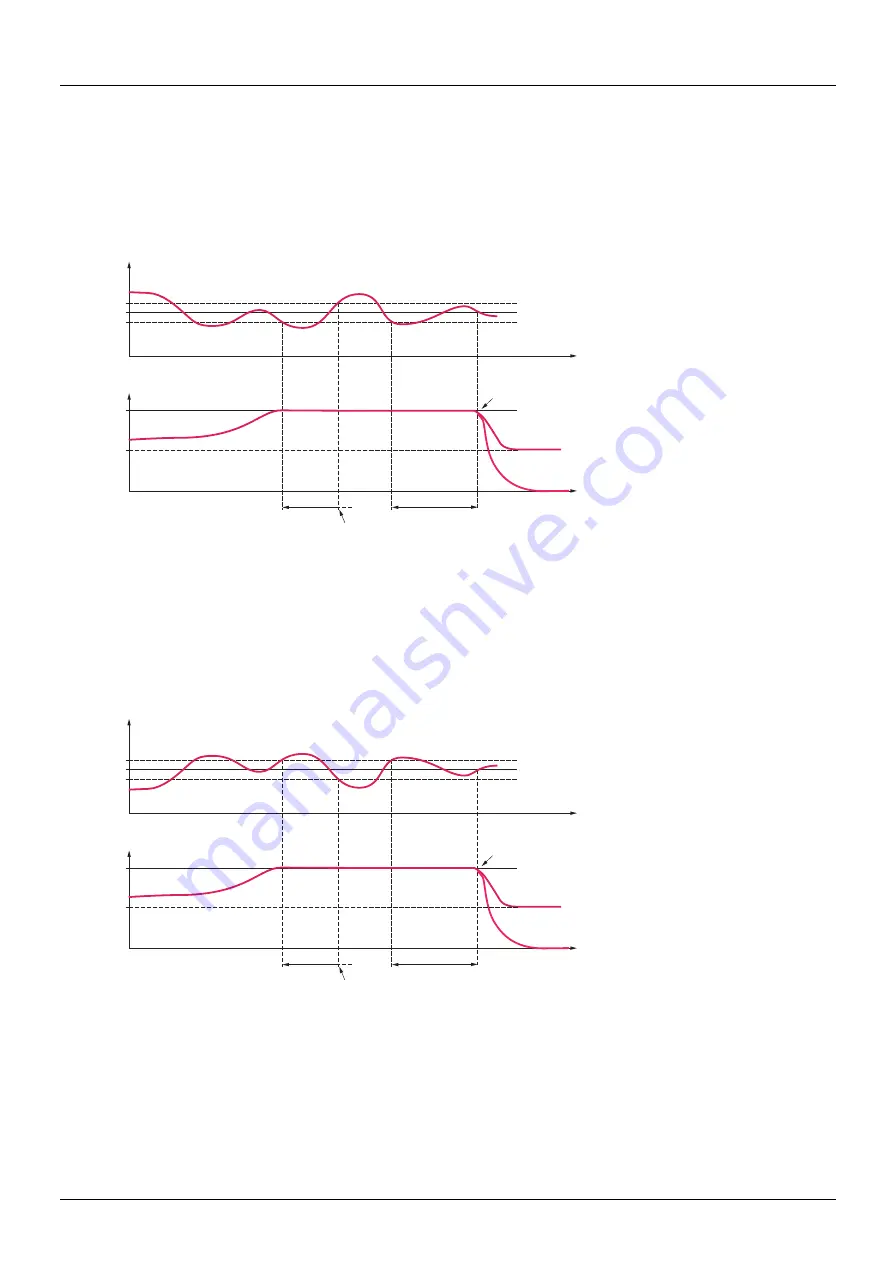
Where
[PID correct. reverse]
(PIC)
=
[No]
(nO)
If, once maximum speed has been reached (
[High speed]
(HSP)
), the PID feedback is lower than the supervision threshold
[PID Threshold]
(LPI)
-2%, a time delay tPI is launched. If at the end of this time delay the value of the PID feedback is still lower than the supervision
threshold
[PID Threshold]
(LPI)
+ 2%, the drive switches to fallback mode as defined by parameter MPI.
In all cases the drive reverts to PID regulation mode as soon as the PID feedback exceeds the supervision threshold
[PID Threshold]
(LPI)
+2%.
Where
[PID correct. reverse]
(PIC)
=
[Yes]
(YES)
If, once maximum speed has been reached (
[High speed]
(HSP)
), the PID feedback is higher than the supervision threshold
[PID Threshold]
(LPI)
+2%, a time delay tPI is launched. If at the end of this time delay the value of the PID feedback is still higher than the supervision
threshold
[PID Threshold]
(LPI)
-2%, the drive switches to fallback mode as defined by parameter MPI.
In all cases the drive reverts to PID regulation mode as soon as the PID feedback undershoots the supervision threshold
[PID Threshold]
(LPI)
-2%.
LPI + 2 %
LPI
LPI - 2 %
HSP
LFF
MPI = LFF
MPI = FSt
< tPI
tPI
0
0
Fallback mode
defined by MPI
Time delay stopping
PID feedback
Motor frequency
LPI + 2 %
LPI
LPI - 2 %
HSP
LFF
MPI = LFF
MPI = FSt
< tPI
tPI
0
0
Fallback mode
defined by MPI
Time delay stopping
PID feedback
Motor frequency
Summary of Contents for ER40-G
Page 2: ......
Page 21: ...21 The display flashes to indicate the presence of a fault ...
Page 241: ......





















































