





























Parameterization and Commissioning
FC5101 and FC5102
33
Version: 2.0
No Reaction
The failure of a node has no effect on the other bus devices
Stop All Nodes
After the failure of a node, all other previously started nodes are stopped (NMT stop remote node command).
You then need to restart the system.
General CAN Node
If you have selected this checkbox, the entire CANopen network management for this device is deactivated.
It is not started, monitored etc. The PDO entries are regarded as pure CAN telegrams (layer 2) and made
available to the controller on an event-driven basis.
CANopen terminology
As the CANopen terminology is retained, even in the case of the general CAN nodes, you need to
take into account the fact that RxPDOs are the telegrams sent by the FC510x / EL6751 and TxP-
DOs are the received telegrams.
This option allows any CAN node to be connected to the TwinCAT, if the
and the
bit timing parameters comply. The respective protocol can then be simulated within the PLC pro-
gram. It is also possible to run CANopen devices and general CAN nodes within the same network -
if there are no identifier overlaps (the system structure is such that you cannot use an identifier
twice).
CANopen PDOs
(PDOs) are CAN telegrams which transport process data without a protocol
overhead. RxPDOs are received by node, TxPDOs are sent by the node. This description is contained in the
System Manager from the perspective of the configured node, i.e. RxPDOs are sent by TwinCAT, TxPDOs
are received by TwinCAT.
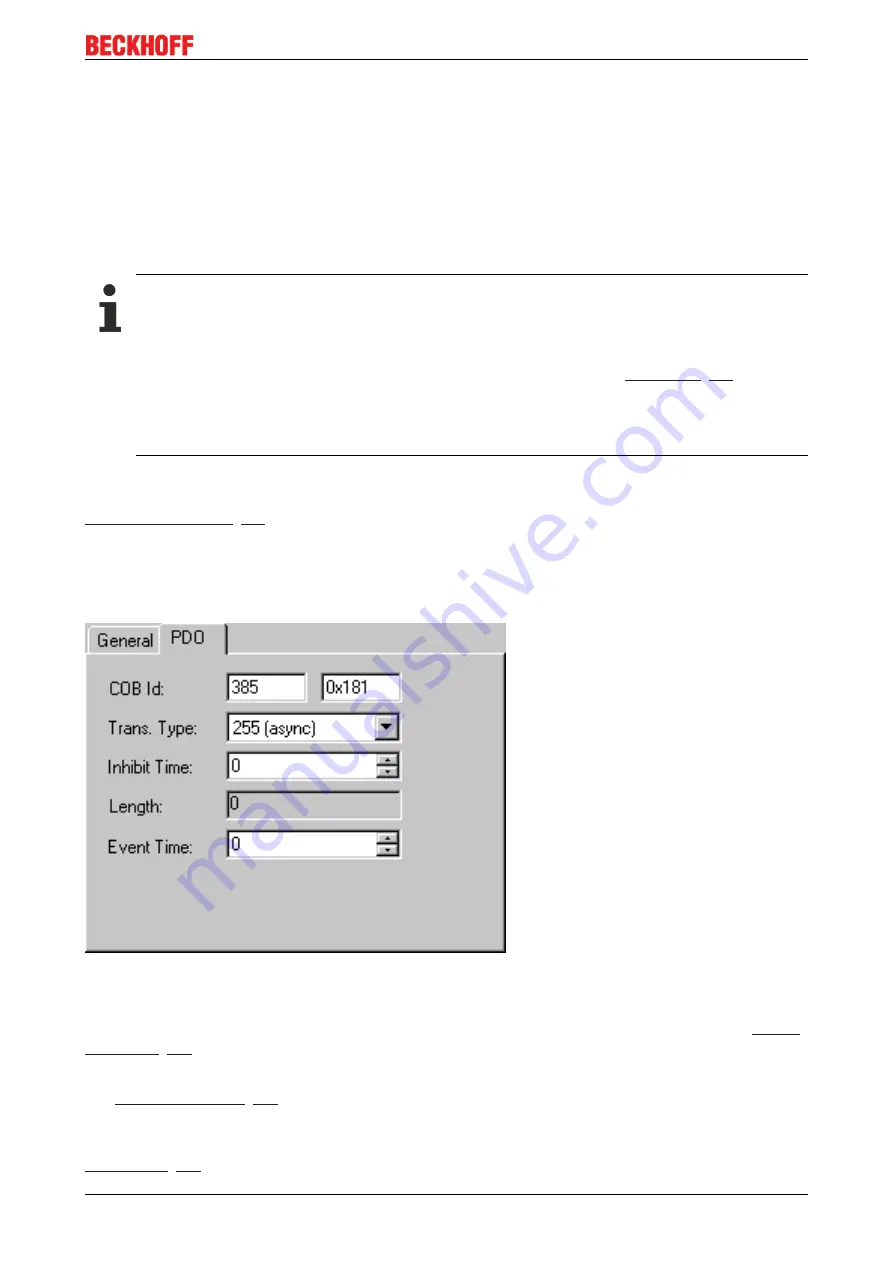
PDO tab
Fig. 29: PDO tab
COB Id
The CAN identifier of this PDO. For every two send and receive PDOs per node, CANopen provides
. These can then be changed.
Trans.Type
determines the send behavior of the PDO. 255 corresponds to the event
driven send.
Inhibit Time
between two identical PDOs. Is entered in multiples of 0.1 ms.







































































