





























TRACKPOINT 3
OPERATION
3-26
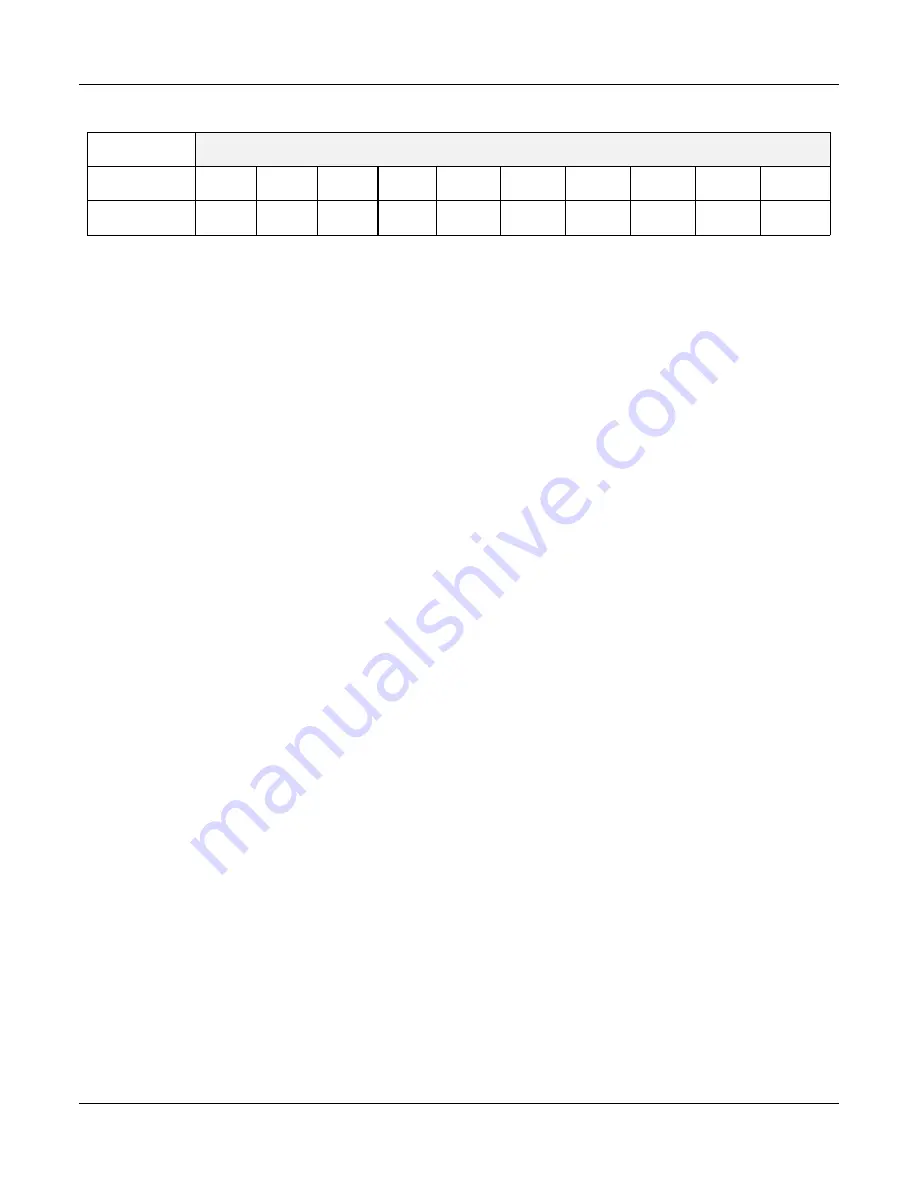
Weight on the Target’s Position Vs the Quality Factor as used in the smoothing
QF
1 2 3 4 5 6 7 8 9 10
Weight
0 0 .04
.08
.12
.16 .2 .4 .6 1
RANGE GATE AND TELEMETRY (Transponders & Responders Only)
When telemetry is enabled the system also blank-gates on the telemetry reply. On the primary or
navigation reply the TrackPoint accepts only the first signal arriving at the hydrophone following
the opening of the blanking gate and ignores signals for
≈
80 milliseconds following it. When the
telemetry gate opens the TrackPoint accepts the first signal at the telemetry frequency and all
other signals are ignored until after the next interrogation. This is advantageous when operating in
a high multi-path environment, insuring that the system locks on to the correct reply.
FILTER LEVEL/TIME GATE (Pingers Only)
For pingers the system uses a Time Gating system based on the targets entered repetition interval
instead of the slant range as used in the range gating. Time gating eliminates any unwanted signal
detections that occur at a time when no response is expected. Since the pinger repetition rate is
entered and the reply interval is known, TrackPoint II can determine, within some short time inter-
val, when the next signal is expected and only allows signals which fall within their time window to
be accepted for further processing. It depends upon accurate entry of repetition rates in the TAR-
GET sub-menu for proper tracking. The time gate is a function that compares the time between re-
plies against the entered repetition value. It accepts the first reply that arrives in a window 50 ms
prior to the expected arrival of the signal (beginning of time window) and up to 50 ms after the ex-
pected arrival. It then ignores replies later than 50 ms after the calculated time gate window. If no
replies are detected within a certain period, an error code #2 is flagged and the window opens up
to find the reply.
FILTER LEVEL/VELOCITY FILTER
Velocity filtering is a technique of rejecting any target position changes that are unlikely due to an
assumed maximum target velocity and elapsed time since last update. It is based on the differ-
ence between the previous X and Y position (averaged, if smoothing is enabled) and the present
targets X and Y position. If the present calculated position passes the velocity filter test it is then
sent to the smoothing function. If after a certain period of time there is no reply within the ex-
pected area then an error code #5 is flagged and the system opens up to find the reply.
NOTE:
A fast-turning ship can cause the target to appear to be traveling at excessive
speeds and be rejected by the velocity filter, when the compass option is not in use.
Threshold: The Threshold key steps through five threshold settings for each target: As the thresh-
old level is increased, only stronger signals are accepted, and weak signals, which could be caused
Summary of Contents for TRACKPOINT 3 4211A
Page 3: ......
Page 5: ......
Page 13: ...PRECAUTIONS viii ...
Page 14: ...SECTION ONE GENERAL INFORMATION ...
Page 15: ......
Page 18: ...TRACKPOINT 3 GENERAL INFORMATION 1 3 TRACKPOINT 3 CONSOLE FRONT VIEW FIGURE 1 1 ...
Page 20: ...TRACKPOINT 3 GENERAL INFORMATION 1 5 TRACKPOINT 3 SYSTEM COMPONENTS FIGURE 1 3 ...
Page 21: ...TRACKPOINT 3 GENERAL INFORMATION 1 6 FIGURE 1 4 ...
Page 27: ...TRACKPOINT 3 GENERAL INFORMATION 1 12 ...
Page 28: ...SECTION TWO INSTALLATION ...
Page 29: ......
Page 34: ...TRACKPOINT 3 INSTALLATION 2 5 FIGURE 2 2 ...
Page 35: ...TRACKPOINT 3 INSTALLATION 2 6 FIGURE 2 3 ...
Page 38: ...TRACKPOINT 3 INSTALLATION 2 9 MODEL 4740A INSTALLATION FIGURE 2 5 ...
Page 39: ...TRACKPOINT 3 INSTALLATION 2 10 FIGURE 2 6 C A U T I O N ...
Page 52: ...TRACKPOINT 3 INSTALLATION 2 23 FIGURE 2 15 ...
Page 53: ...TRACKPOINT 3 INSTALLATION 2 24 FIGURE 2 16 ...
Page 56: ...TRACKPOINT 3 INSTALLATION 2 27 FIGURE 2 17 ...
Page 62: ...SECTION THREE OPERATION ...
Page 63: ......
Page 132: ...TRACKPOINT 3 OPERATION 3 69 ...
Page 177: ...SECTION FOUR PRINCIPLES OF OPERATION ...
Page 178: ......
Page 183: ...TRACKPOINT 3 PRINCIPLES OF OPERATION 4 5 ...
Page 185: ...TRACKPOINT 3 PRINCIPLES OF OPERATION 4 7 TRACKPOINT BLOCK DIAGRAM FIGURE 4 3A ...
Page 186: ...TRACKPOINT 3 PRINCIPLES OF OPERATION 4 8 TRACKPOINT BLOCK DIAGRAM FIGURE 4 3B ...
Page 189: ...SECTION FIVE MAINTENANCE ...
Page 190: ......
Page 193: ...TRACKPOINT 3 MAINTENANCE 5 1 DSP CARD PROGRAMMING MODE JUMPER FIGURE 5 1 ...
Page 201: ...APPENDIX A CARE OF CABLES ...
Page 202: ......
Page 204: ...TRACKPOINT 3 APPENDIX A A 2 ...
Page 205: ...APPENDIX B STATIC DISCHARGE ...
Page 206: ......
Page 208: ...TRACKPOINT 3 APPENDIX B B 2 ...
Page 209: ...APPENDIX C WARRANTY ...
Page 210: ......
Page 212: ...TRACKPOINT 3 APPENDIX C C 2 ...
Page 213: ...APPENDIX D DRAWINGS ...
Page 214: ......
Page 216: ...TRACKPOINT 3 APPENDIX D D 2 ...
Page 217: ......
Page 218: ......
Page 219: ......
Page 220: ......
Page 221: ......
Page 222: ......
Page 223: ......
Page 224: ......
Page 225: ......
Page 226: ......
Page 230: ......
Page 231: ......
Page 232: ......
Page 235: ......
Page 236: ......
Page 240: ......
Page 241: ......
Page 242: ......
Page 244: ......
Page 246: ......
Page 247: ......
Page 248: ......
Page 249: ......
Page 250: ......
Page 251: ......
Page 252: ......







































































