





























C
OMMAND
M
ODE
D
ATA
F
ORMAT
Networked Indexer/Driver User Manual
ADVANCED MICRO CONTROLS INC.
80
Input Data Format
The correct format for the Network Input Data when the Networked Driver is in Command Mode is shown
below.
† Note that this is the value of the most recently programmed motor current. It is not the actual
motor current being sent to the motor when the input data was read.
Table R7.19 Network Input Data Format: Command Mode
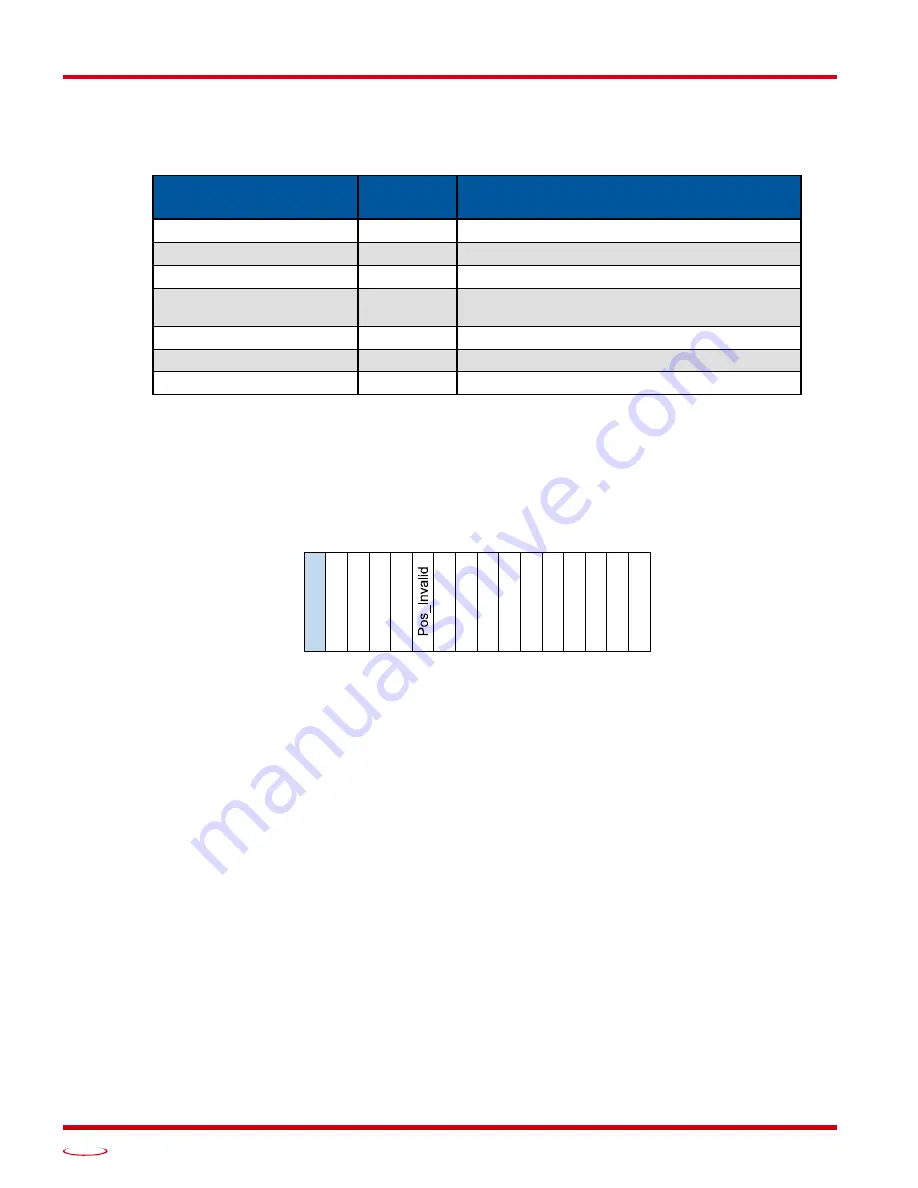
STATUS_word0 Format
Figure R7.4 Command Mode: Status_word0 Format
Bit 15: Mode_Flag –
Set to “0” in Command Mode.
Bit 14: Module_OK –
“1” when the Networked Driver is operating without a fault, “0” when an internal
fault condition exists.
Bit 13: Configuration_Error –
“1” on power up before a valid configuration has been written to the Net-
worked Driver or after any invalid configuration has been written to the driver. “0” when the Net-
worked Driver has a valid configuration written to it.
Bit 12: Command_Error –
“1” when an invalid command has been written to the Networked Driver. This
bit can only be reset by the Reset_Errors bit, CMD_word0, Bit 10. Note that setting the motor cur-
rent to a value outside the range of 1.0 to 6.0 amps on the SD17060E-K, or 1.0 to 4.4 amps on the
SD31045E-K, or an odd number within these ranges, does not force a command error. The driver
simply ignores the new value and uses the last accepted value for the motor current.
ESI File
Name
Data
Size
Function
STATUS_word0
UINT
Status Word 0
STATUS_word1
UINT
Status Word 1
Motor_Position
DINT
Current commanded motor position
Encoder_Position
DINT
Current encoder position.
(Zero if encoder is not available or disabled.)
Trapped_Encoder_Position
DINT
Last captured encoder position
Motor_Current
UINT
Motor current of last move.
†
Jerk
UINT
Jerk value of last move.
STATUS_word0
15 14 13 12 11 10 09 08 07 06 05 04 03 02 01 00
Modul
e_O
K
Conf
ig_Er
r
Command
_
E
rr
Inp
u
t_Er
r
W
ai
t_
Assy
S
e
g
In
_As
s
y_Mo
de
Move
_Cm
p
D
ec
ele
rat
in
g
A
cc
ele
rat
in
g
At_Home
Stop
ped
In
_Hol
d_St
a
te
M
o
v
in
g_CC
W
M
ovi
ng_
C
W
0







































































