





























Note
Action
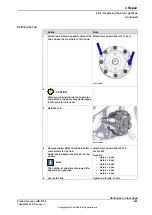
Stretch the lifting accessories and stretch
the lifting accessories to take the weight of
the robot.
3
Adjust if needed to make the lift level.
DANGER
Turn off all:
•
electric power supply
•
hydraulic pressure supply
•
air pressure supply
to the robot, before entering the robot
working area.
4
Removing the supporting pillars
Note
Action
Unscrew the attachment screws that secure
the robot base to the supporting pillars.
1
Use caution and lift the robot up from the
supporting pillars.
2
Unscrew the attachment screws that secure
the supporting pillars to the foundation.
3
Remove the supporting pillars.
4
Screws: M24 x 100 (12 pcs), 8.8.
Lower the robot onto the foundation and
secure.
5
Washers: 4 mm flat washer
Tightening torque:
550 Nm (screws lubricated with Molykote
1000)
600-725 Nm, typical 650 Nm (screws none
or lightly lubricated)
Refitting the cable harness in the base
Note
Action
DANGER
Make sure that all supplies for electrical
power, hydraulic pressure, and air pressure
are turned off.
1
Continues on next page
Product manual - IRB 8700
671
3HAC052853-001 Revision: F
© Copyright 2015-2018 ABB. All rights reserved.
4 Repair
4.8.2 Replacing the axis-1 gearbox
Continued
Summary of Contents for IRC5 Compact
Page 1: ...ROBOTICS Product manual IRB 8700 ...
Page 16: ...This page is intentionally left blank ...
Page 824: ...This page is intentionally left blank ...
Page 838: ...This page is intentionally left blank ...
Page 840: ...This page is intentionally left blank ...
Page 846: ......
Page 847: ......







































































