




























Note
Action
xx1400002584
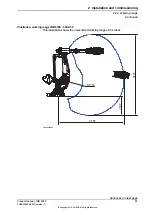
Jog the robot to its shipping position:
•
Axis-1: -90° or 90°
•
Axis-2: -65°
•
Axis-3: 2°
•
Axis-4:
•
Axis-5: 90°
•
Axis-6: -90°
Note
The figure shows the shipping position of an un-
dressed robot. It the robot is dressed, this must
be taken in consideration when the robot is lifted.
2
DANGER
Turn off all:
•
electric power supply
•
hydraulic pressure supply
•
air pressure supply
to the robot, before entering the robot working
area.
3
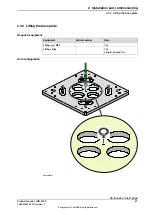
Attachment points for the fork lift accessory set
Note
Action
xx1500002297
The attachment points for the fork lift accessory
set, can be found in the four corners of the base.
1
Attaching the fork lift accessory set
Note
Action
CAUTION
Each fork lift accessory pocket weights 18 kg. Use
caution when handling them.
1
Continues on next page
Product manual - IRB 8700
59
3HAC052853-001 Revision: F
© Copyright 2015-2018 ABB. All rights reserved.
2 Installation and commissioning
2.3.1 Lifting the robot with fork lift accessory set installed
Continued
Summary of Contents for IRC5 Compact
Page 1: ...ROBOTICS Product manual IRB 8700 ...
Page 16: ...This page is intentionally left blank ...
Page 824: ...This page is intentionally left blank ...
Page 838: ...This page is intentionally left blank ...
Page 840: ...This page is intentionally left blank ...
Page 846: ......
Page 847: ......





















































