





























ZMC408SCAN Motion Controller Hardware Manual V1.5
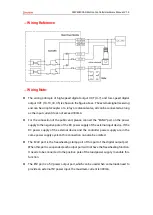
3.1.3.
Basic Usage Method
(1)
Please follow the above wiring instructions to wiring correctly.
(2)
After powered on, please use any one interface among the three interfaces
(ETHERNET, RS232, RS485) to connect to ZDevelop;
(3)
Please use the "CANIO_ADDRESS" command to set the master's "address" and
"speed" according to the needs, and use the "CANIO_ENABLE" command to enable or
disable the internal CAN master function, or through "ZDevelop/Controller/State the
Controller/Communication
Info” to
view the CAN status intuitively, and refer to the
“ZBasic Programming Manual” for details
.
(4)
Correctly set the "address" and "speed" of the slave station expansion module
according to the manual of the slave station.
(5)
After all the settings are completed, restart the power supply of all stations to
establish communication.
(6)
Note that the "speed" settings of each node on the CAN bus must be consistent, and
the "address" settings cannot cause conflicts, otherwise the "ALM" alarm light will be
Содержание ZMC408SCAN
Страница 1: ......
Страница 52: ...ZMC408SCAN Motion Controller Hardware Manual V1 5 Wiring reference of terminal s 12 DA...







































































