





















ZMC408SCAN Motion Controller Hardware Manual V1.5
7
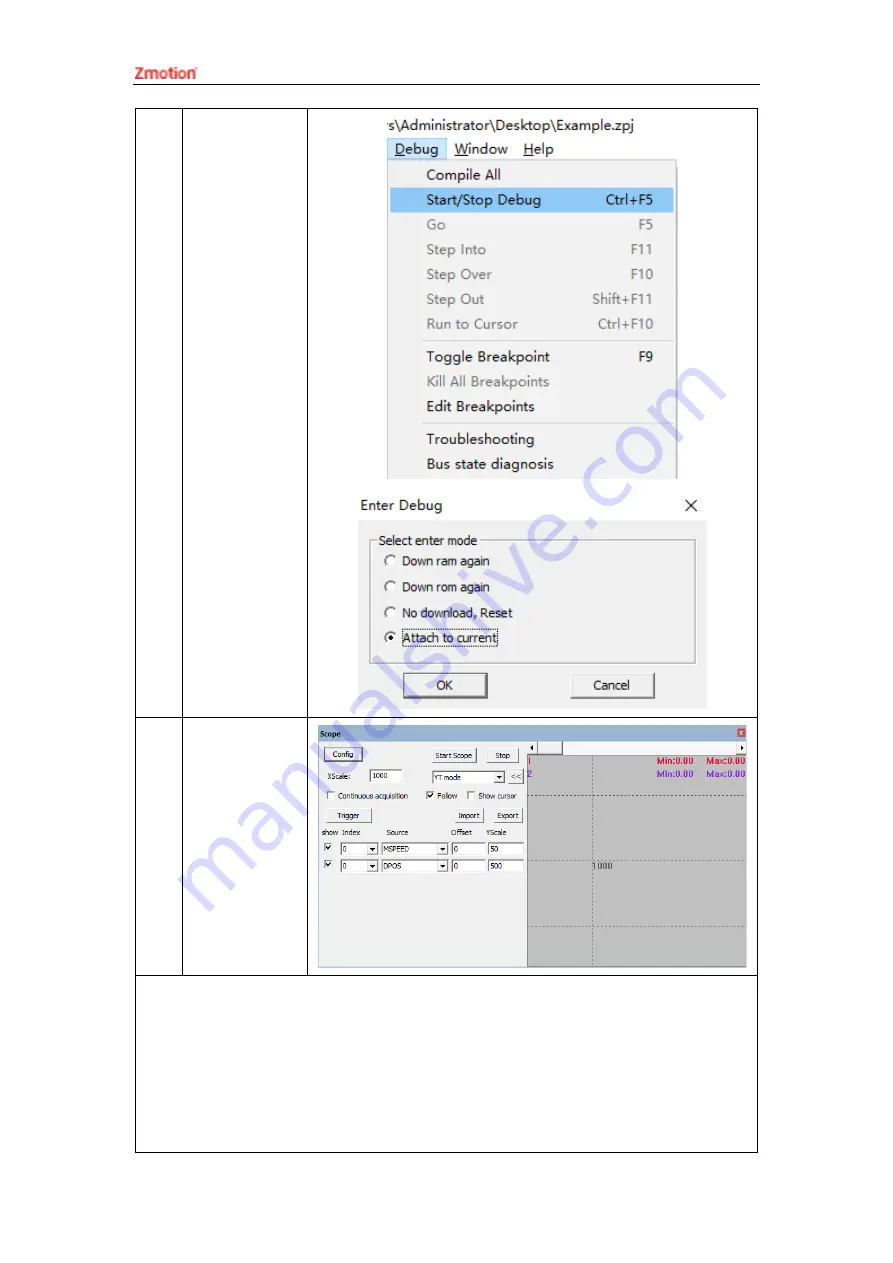
Click “Debug” –
“Start/Stop
Debug” to call
“Task”
and
“Watch”
window,
because it was
downloaded
before,
here
select “Attach
the current”.
8
Click “View” –
“Scope” to open
oscilloscope.
Note:
⚫
When opening an project, choose to open the zpj file of the project. If only the Bas file
is opened, the program cannot be downloaded to the controller.
⚫
When the project is not created, only the Bas file cannot be downloaded to the
controller.
⚫
The number 0 in automatic operation represents the task number, and the program
Содержание ZMC408SCAN
Страница 1: ......
Страница 52: ...ZMC408SCAN Motion Controller Hardware Manual V1 5 Wiring reference of terminal s 12 DA...







































































