




























ZMC408SCAN Motion Controller Hardware Manual V1.5
Attention:
1.
Buffer output means output logic follows the logic of EXIO port that is to be mapped.
2.
Initial logic is 0 after EXIO port is configured as output, namely, initial logic of OUT
corresponding to above also is 0 and the output voltage is about 0.1V. If operation
OUT port output is 1, then output voltage is about 4.9V.
→
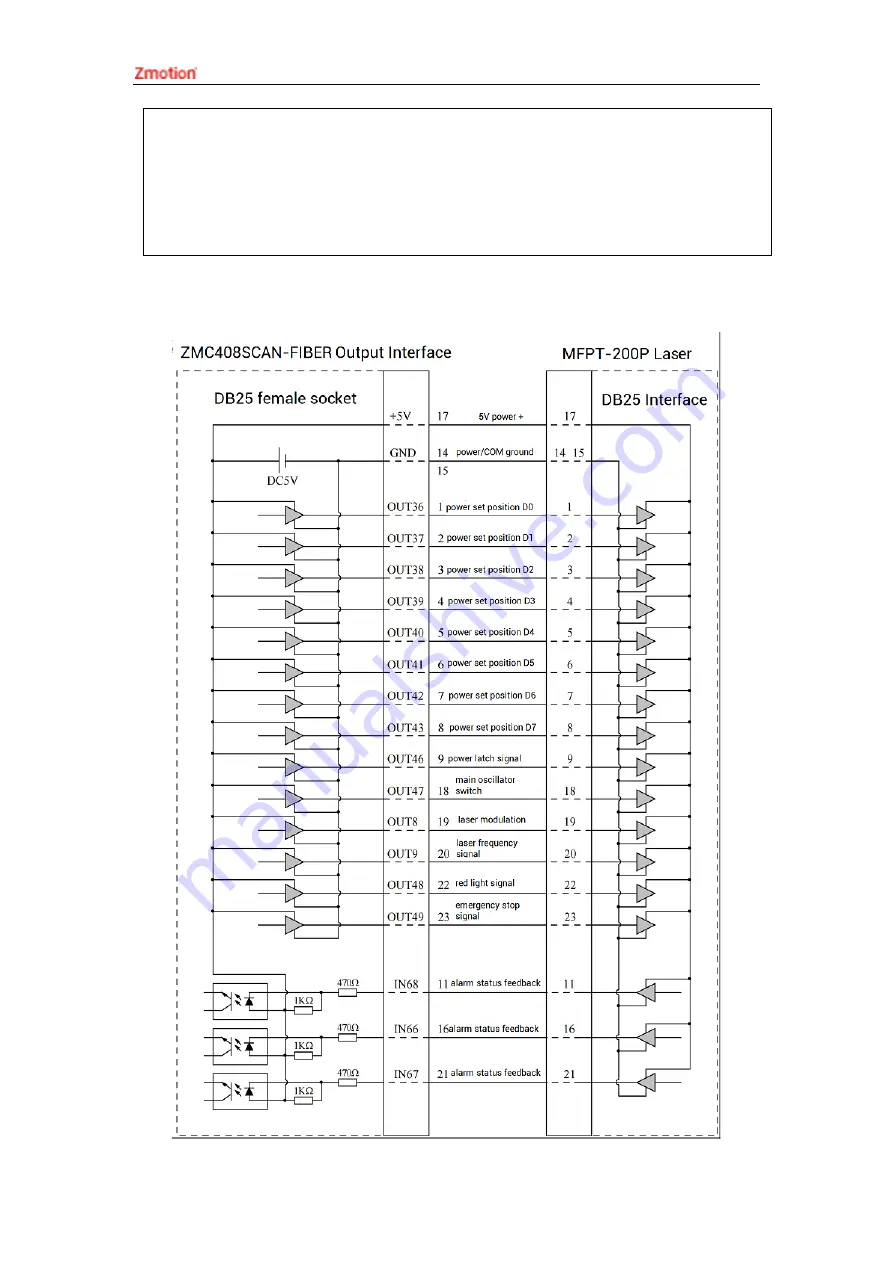
Wiring Reference
Содержание ZMC408SCAN
Страница 1: ......
Страница 52: ...ZMC408SCAN Motion Controller Hardware Manual V1 5 Wiring reference of terminal s 12 DA...







































































