





























6-4
IM 760101-11E
Operation of the Standard Event Register
The standard event register is provided for eight
different kinds of event which can occur inside the
instrument. Bit 5 (ESB) of the status byte is set to “
1
”
when any of the bits in this register becomes “
1
” (or
when the corresponding bit of the standard event
enable register becomes “
1
”).
Examples
1. A query error occurs.
2. Bit 2 (QYE) is set to “
1
”.
3. Bit 5 (ESB) of the status byte is set to “
1
” if bit 2 of
the standard event enable register is “
1
”.
It is also possible to check what type of event has
occurred inside the instrument by reading the contents
of the standard event register.
Reading from the Standard Event Register
The contents of the standard event register can be
read by the
*ESR
command. After completion of the
read-out, the register will be cleared.
Clearing the Standard Event Register
ïThe standard event register is cleared in the following
three cases.
• When the contents of the standard event register
are read using
*ESR?
• When the
*CLS
command is received
• When power is turned ON again
6.3 Standard Event Register/6.4 Extended Event Register
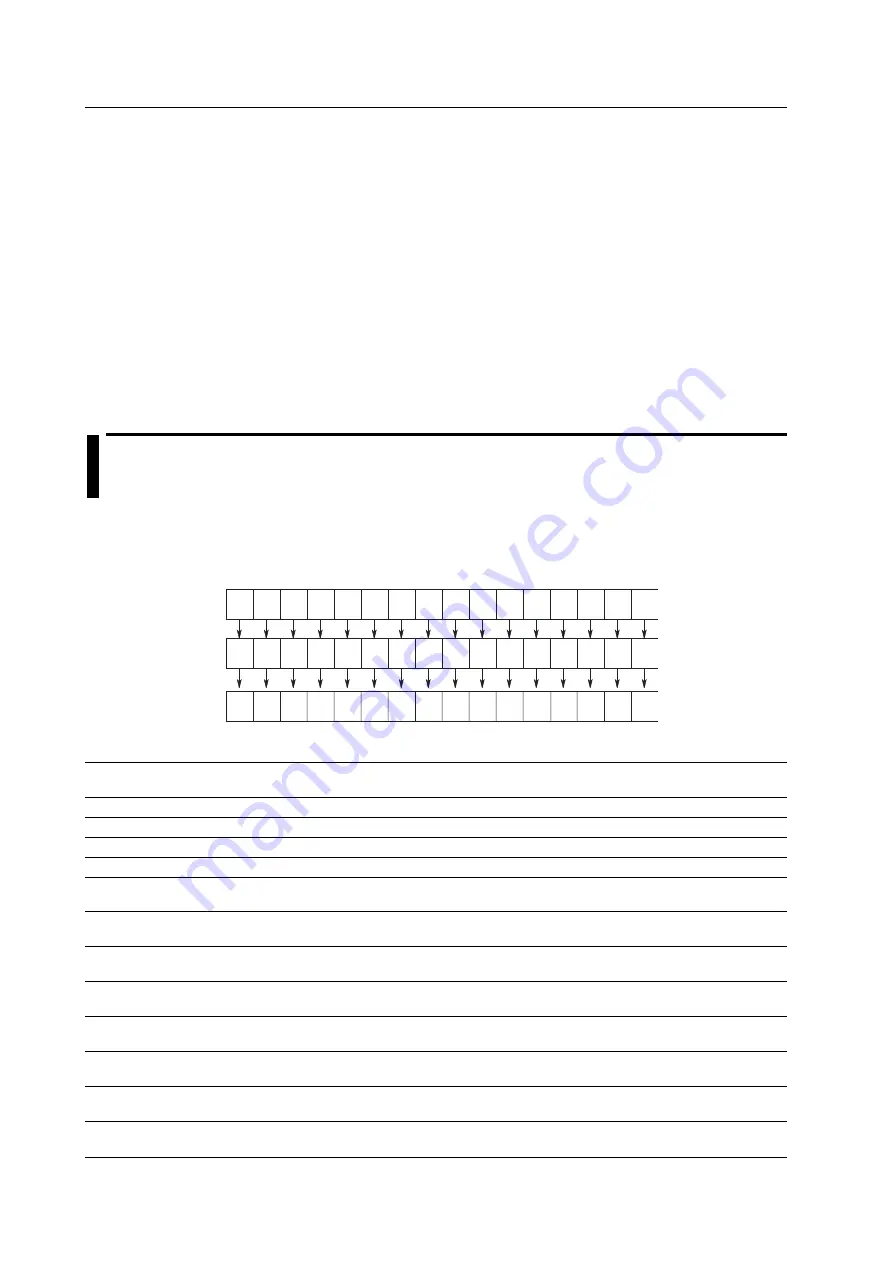
6.4
Extended Event Register
Reading the extended event register tells you whether changes in the condition register (reflecting internal
conditions) have occurred. A filter can be applied which allows you to decide which events are reported to
the extended event register.
ACS
6
PLLE
7
5
4
3
2
1
0
PRN
FOV
SRB
ITM
ITG
UPD
OVR1
8
OVR2
9
OVR3
10
OVR4
11
OVR5
12
OVR6
13
OVRM
14
POV
15
6
7
5
4
3
2
1
0
8
9
10
11
12
13
14
15
Condition register
:STATus:CONDition?
Transition filter
0
14
15
Extended event register
1
6
7
5
4
3
8
9
10
11
12
13
2
6
7
5
4
3
2
1
8
9
10
11
12
13
14
15
16
:STATus:FILTer<x>
{RISE|FALL|BOTH|NEVer}
:STATus:EESR?
FILTer<x> ->
The meaning of each bit of the condition register is as follows.
Bit 0
UPD (Updating)
Set to “
1
” when the measured data is being updated.
The falling edge of UPD (1 -> 0) signifies the end of the updating.
Bit 1
ITG (Integrate Busy)
Set to “
1
” while integration is in progress.
Bit 2
ITM (Integrate Timer Busy)
Set to “
1
” while the integration timer is running.
Bit 3
SRB (Store/Recall Busy)
Set to “
1
” while storing or recalling data.
Bit 4
FOV (Frequency Over)
Set to “
1
” when the frequency is in error.
Bit 5
PRN (Printing)
Set to “
1
” while the internal printer is in operation or data is being output to the
external printer (Centronics or network printer).
Bit 6
ACS (Accessing)
Set to “
1
” while the floppy disk, internal hard disk, or external disk drive (SCSI or
network device) is being accessed.
Bit 7
PLLE
Set to “
1
” when there is no input to the PLL source and synchronization cannot be
(PLL Source Input Error)
achieved during harmonic measurement.
Bit 8
OVR1
Set to “
1
” when the voltage or current of element 1 is over the range.
(Element1 Measured Data Over)
Bit 9
OVR2
Set to “
1
” when the voltage or current of element 2 is over the range.
(Element1 Measured Data Over)
Bit 10
OVR3
Set to “
1
” when the voltage or current of element 3 is over the range.
(Element3 Measured Data Over)
Bit 11
OVR4
Set to “
1
” when the voltage or current of element 4 is over the range.
(Element4 Measured Data Over)
Содержание wt1600
Страница 1: ...Digital Power Meter Communication Interface IM 760101 11E 4th Edition ...
Страница 131: ...7 2 IM 760101 11E 7 2 Sample Program Image ...
Страница 138: ...Sample Program 7 9 IM 760101 11E 7 7 4 Output of Normal Measurement Data ...
Страница 142: ...Sample Program 7 13 IM 760101 11E 7 7 5 Output of Harmonic Measurement Data ...







































































