





























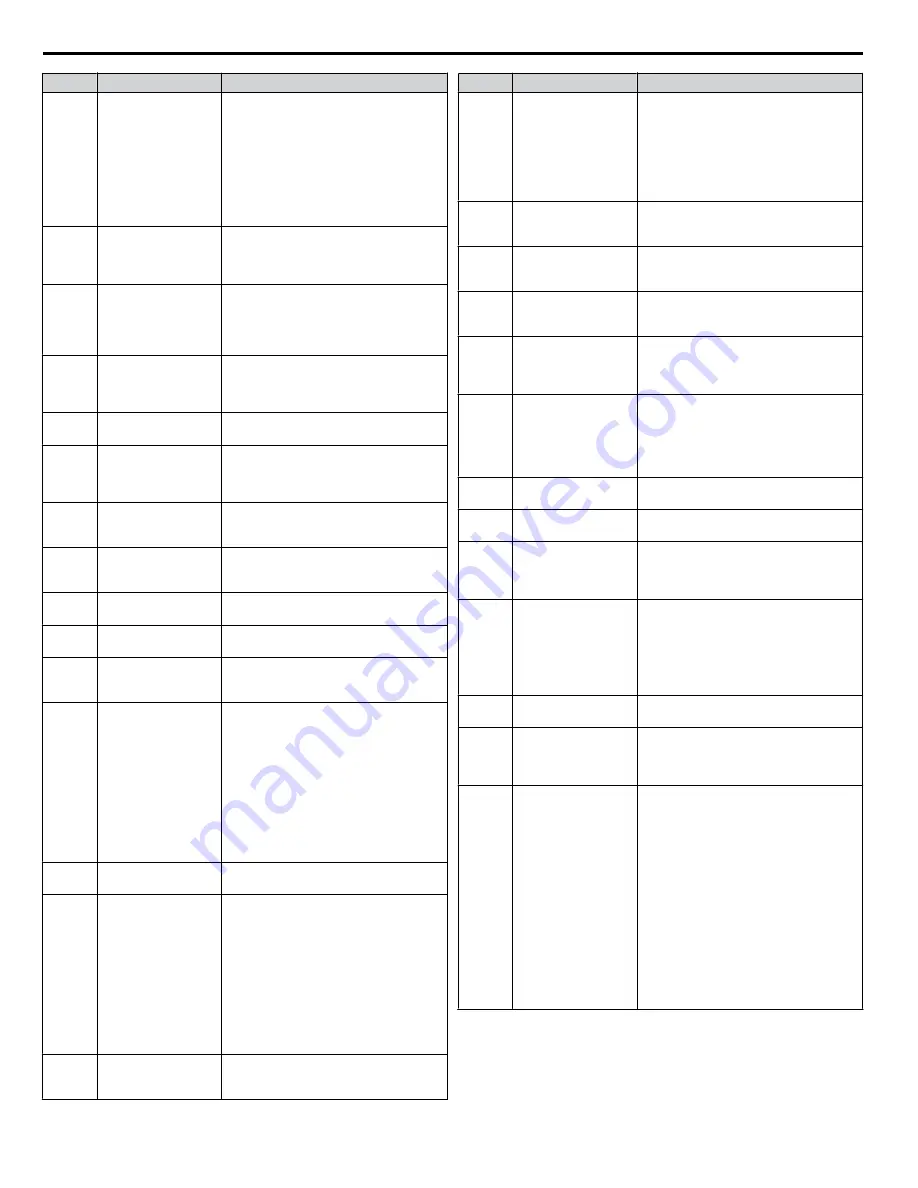
No.
Name
Description
H5-02
Communication Speed
Selection
0: 1200 bps
1: 2400 bps
2: 4800 bps
3: 9600 bps
4: 19200 bps
5: 38400 bps
6: 57600 bps
7: 76800 bps
8: 115200 bps
Cycle power for the setting to take effect.
H5-03
Communication Parity
Selection
0: No parity
1: Even parity
2: Odd parity
Cycle power for the setting to take effect.
H5-04
Stopping Method after
Communication Error
(CE)
0: Ramp to stop
1: Coast to stop
2: Fast Stop
3: Alarm only
4: Run at H5-14
H5-05
Communication Fault
Detection Selection
0: Disabled
1: Enabled. If communication is lost for
more than two seconds, a CE fault will
occur.
H5-13
Power-up CALL
Alarm
0: Disabled
1: Enabled
H6-01
Pulse Train Input
Terminal RP Function
Selection
0: Frequency reference
1: PID feedback value
2: PID setpoint value
5: Flow meter
H6-02
Pulse Train Input
Scaling
Sets the terminal RP input signal frequency
that is equal to 100% of the value selected
in H6-01.
H6-03
Pulse Train Input Gain
Sets the level of the value selected in H6-01
when a frequency with the value set in
H6-02 is input.
H6-04
Pulse Train Input Bias Sets the level of the value selected in H6-01
when 0 Hz is input.
H6-05
Pulse Train Input Filter
Time
Sets the pulse train input filter time
constant.
H6-08
Pulse Train Input
Minimum Frequency
Sets the minimum frequency for the pulse
train input to be detected. Enabled when
H6-01 = 0, 1, or 2.
L1-01
Motor Overload
Protection Selection
0: Disabled
1: General purpose motor (standard fan
cooled)
2: Drive dedicated motor with a speed range
of 1:10
3: Vector motor with a speed range of 1:100
6: General purpose motor (50 Hz)
The drive may not be able to provide
protection when using multiple motors,
even if overload is enabled in L1-01. Set
L1-01 to 0 and install separate thermal
relays to each motor.
L1-02
Motor Overload
Protection Time
Sets the motor thermal overload protection
(oL1) time.
L2-01
Momentary Power
Loss Operation
Selection
0: Disabled. Drive trips on Uv1 fault when
power is lost.
1: Recover within the time set in L2-02. Uv1
will be detected if power loss is longer than
L2-02.
2: Recover as long as CPU has power.
Uv1 is not detected.
3: KEB deceleration for the time set to
L2-02.
4: KEB deceleration as long as CPU has
power.
5: KEB deceleration to stop.
L2-02
Momentary Power
Loss Ride-Thru Time
Sets the Power Loss Ride-Thru time.
Enabled only when
L2-01 = 1 or 3.
No.
Name
Description
L2-03
Momentary Power
Loss Minimum
Baseblock Time
Sets the minimum wait time for residual
motor voltage decay before the drive output
reenergizes after performing Power Loss
Ride-Thru.
Increasing the time set to L2-03 may help if
overcurrent or overvoltage occur during
Speed Search or during DC Injection
Braking.
L2-04
Momentary Power
Loss Voltage Recovery
Ramp Time
Sets the time for the output voltage to return
to the preset V/f pattern during Speed
Search.
L2-05
Undervoltage
Detection Level
(Uv1)
Sets the DC bus undervoltage trip level.
L2-06
KEB Deceleration
Time
Sets the time required to decelerate from the
speed when KEB was activated to zero
speed.
L2-07
KEB Acceleration
Time
Sets the time to accelerate to the frequency
reference when momentary power loss is
over. If set to 0.0, the active acceleration
time is used.
L2-08
Frequency Gain at
KEB Start
Sets the percentage of output frequency
reduction at the beginning of deceleration
when the KEB Ride-Thru function is
started.
Reduction = (slip frequency before KEB) ×
L2-08 × 2
L2-10
KEB Detection Time
(Minimum KEB Time) Sets the time to perform KEB Ride-Thru.
L2-11
DC Bus Voltage
Setpoint during KEB
Sets the desired value of the DC bus voltage
during KEB Ride-Thru.
L2-29
KEB Method Selection
0: Single Drive KEB Ride-Thru 1
1: Single Drive KEB Ride-Thru 2
2: System KEB Ride-Thru 1
3: System KEB Ride-Thru 2
L3-01
Stall Prevention
Selection during
Acceleration
0: Disabled.
1: General purpose. Acceleration is
paused as long as the current is above the
L3-02 setting.
2: Intelligent. Accelerate in the shortest
possible time without exceeding the L3-02
level.
L3-02
Stall Prevention Level
during Acceleration
Used when L3-01 = 1 or 2. 100% is equal
to the drive rated current.
L3-03
Stall Prevention Limit
during Acceleration
Sets Stall Prevention lower limit during
acceleration when operating in the constant
power range. Set as a percentage of drive
rated current.
L3-04
Stall Prevention
Selection during
Deceleration
0: Disabled. Deceleration at the active
deceleration rate. An ov fault may occur.
1: General purpose. Deceleration is paused
when the DC bus voltage exceeds the Stall
Prevention level.
2: Intelligent. Decelerate as fast as possible
while avoiding ov faults.
3: Stall Prevention with braking resistor.
Stall Prevention during deceleration is
enabled in coordination with dynamic
braking.
4: Overexcitation Deceleration.
Decelerates while increasing the motor
flux.
5: Overexcitation Deceleration 2. Adjust
the deceleration rate according to the DC
bus voltage.
i.8 Parameter Table
90
YASKAWA TOEP YAIP1W 02E YASKAWA AC Drive - iQpump1000 Installation & Start-up Guide
Содержание CIMR-PW*A Series
Страница 113: ......







































































