





























Printed in the Federal Republic of Germany
TR-Electronic GmbH 2016, All Rights Reserved
09/29/2020
TR-EMO-BA-GB-0022 v03
Page 33 of 153
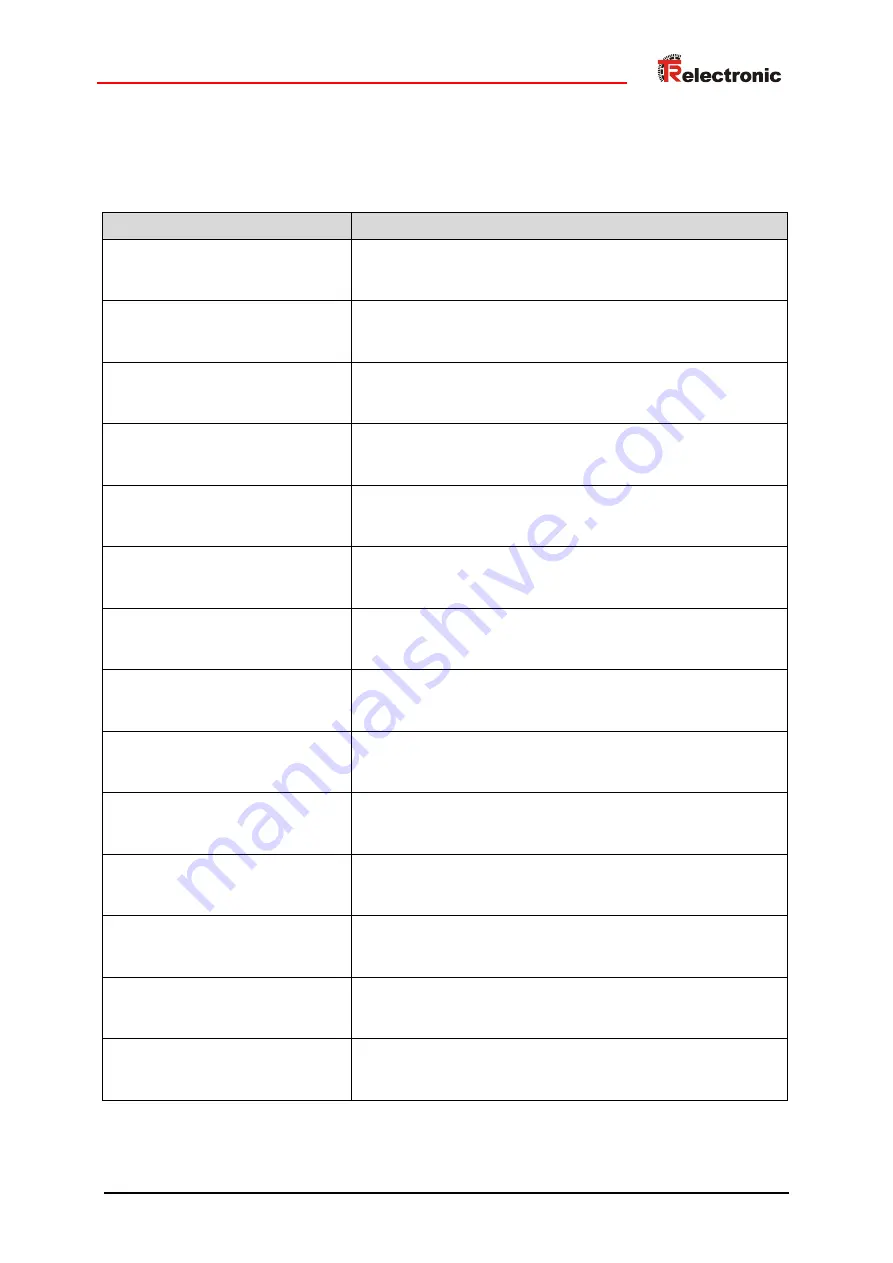
5.1.2 State transitions
The transition between these states occurs partially via internal events, partially via commands that
are transferred in the control word (0x6040):
Transition
Description
T0:
START
-> NOT READY TO SWITCH ON
The drive performs an initialization.
T1:
NOT READY TO SWITCH ON
-> SWITCH ON DISABLED
Communication is activated.
T2:
SWITCH ON DISABLED
-> READY TO SWITCH ON
Drive receives the command
“Shut down”.
T3:
READY TO SWITCH ON
-> SWITCHED ON
The output stage is released.
T4:
SWITCHED ON
-> OPERATION ENABLE
Drive receives the command “Enable Operation”.
T5:
OPERATION ENABLE
-> SWITCHED ON
Drive receives the command “Disable Operation”.
T6:
SWITCHED ON
-> READY TO SWITCH ON
The drive unit is deactivated.
T7:
READY TO SWITCH ON
-> SWITCH ON DISABLED
Drive receives the command “Quick Stop”
T8:
OPERATION ENABLE
-> READY TO SWITCH ON
The drive unit is switched off. If it is in motion, it is stopped
according to the
Shutdown Option Code
(object 0x605B).
T9:
OPERATION ENABLE
-> SWITCH ON DISABLED
The drive unit is switched off. If it is in motion, it is stopped as
quickly as possible and then deactivated.
T10:
SWITCHED ON
-> SWITCH ON DISABLED
The drive unit is switched off.
T11:
OPERATION ENABLE
-> QUICK STOP ACTIVE
The drive unit is stopped according to object 0x605A
(
Quick Stop Option Code
).
T12:
QUICK STOP ACTIVE
-> SWITCH ON DISABLED
The transition is possible if the value
5 is stored in object
0x605A (
Quick Stop Option Code
). The drive unit is then
stopped as quickly as possible and then switched off.
T13:
ALL STATES
-> FAULT REACTION ACTIVE
The relevant troubleshooting is carried out.







































































