





























- 38 -
Details of step data
Refer to
“Appendix 1. Default setting value per the electric actuator”
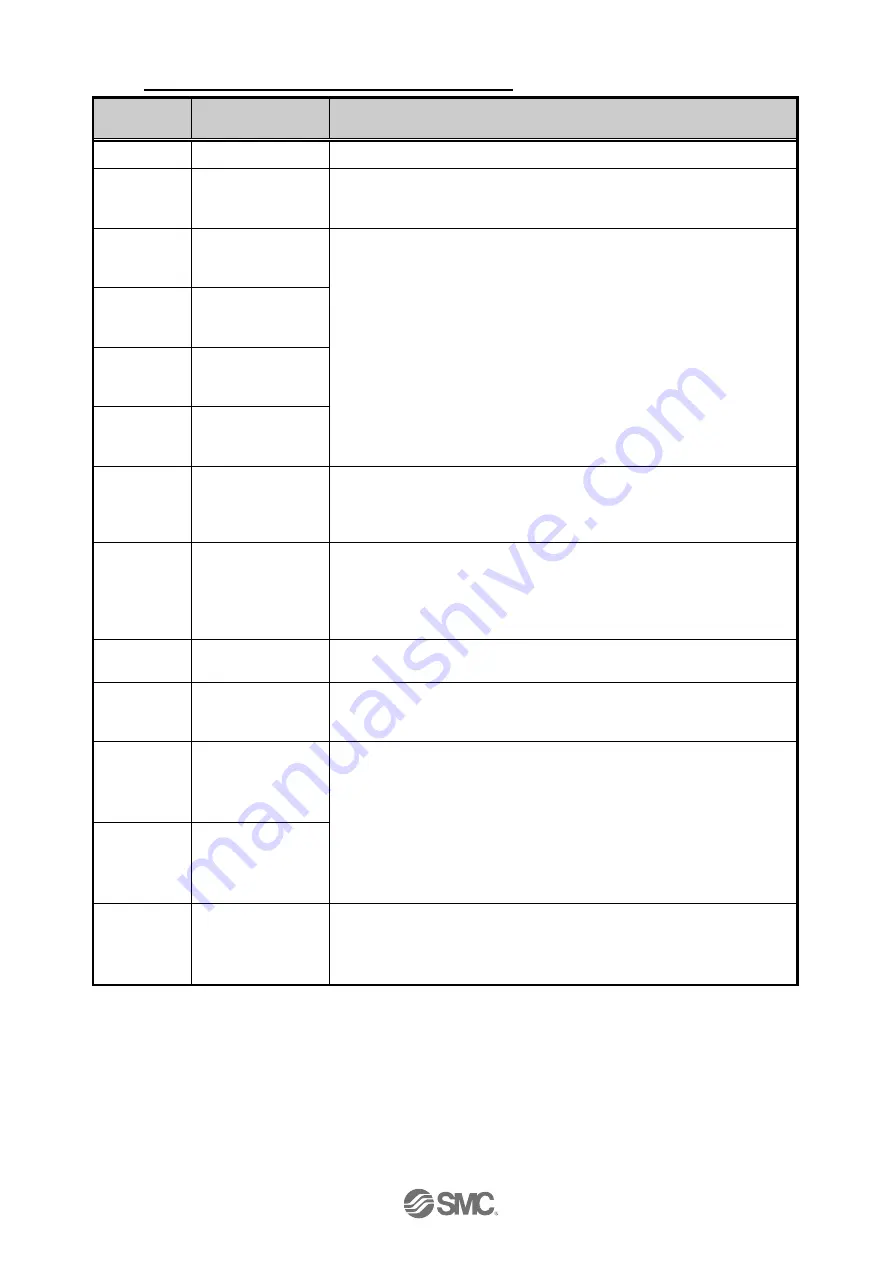
Setting
name
Range
Description
No.
0 to 63
Number of the step data.
Movement
MOD
3 options
(Blank, Absolute,
Relative)
Not used in this product.
(Select Absolute or Relative. An alarm will be generated if this is blank.)
Speed
Minimum value
*1)
to “Max speed” of
the basic parameter
Not used in this product. These should not be changed.
Position
Stroke (-)” to “Stroke
(+)” of the basic
parameter
Acceleration
1 to “Max
ACC/DEC” of the
basic parameter
Deceleration
1 to “Max
ACC/DEC” of the
basic parameter
Pushing force
0 to "maximum
pushing force" of the
basic parameter
The maximum force for the pushing operatio.
Please refer to the electric actuator manual for the appropriate range of the
speed.
When the "pushing force = 0," an alarm will sound.
Trigger LV
Minimum value to
"maximum pushing
force" of the basic
parameter
Note 1)
A condition where INP output signal during pushing operation is ON.
When the electric actuator generates a force above this value during a
pushing operation, INP will turn ON.
Please refer to the electric actuator manual for the appropriate range of the
speed.
Pushing
speed
*1
)
This sets the upper limit of the pushing speed during a pushing operation.
Please refer to the electric actuator manual for the appropriate speed range.
Moving force
*1
)
The setting to define the maximum torque during the positioning operation.
[Unit: %]
Enter a value within the range appropriate for the electric actuator.
Area1
"Stroke (-)" of the
basic parameter to
"area 2" of the step
data
The setting to define the conditions where the AREA output will be turned
ON (Unit: mm).
If the current position is within the range between the Area1 and Area2, the
AREA output will be turned ON.
If Area1 >
Area2, the alarm “Step Data ALM1” will be activated.
(However, no alarm is generated if “Area1”= “Area2”= 0, the AREA output
will be turned OFF).
Area2
"Area 1" of the step
data to "stroke (+)"
of the basic
parameter
In position
*1
)
This is the setting to define the conditions where the INP will be turned ON.
INP output is ON when the deviation to the pulse signal from PLC is within
the positioning range while pulse signal is not input. If the set value is too
small, INP signal is ON during operation.
*2)
*1) The range varies depending on the electric actuator.
Please refer to the manual of the electric actuator for more details.
*2) Use this set value as the initial value.
If this is set to a value smaller than the initial setting, the INP output may chatter during positioning
recovery upon reaching the target position.





















































