





























69
When fault happens, it will automatic removal of deviation.
But only to clear the fault source, not to clear fault warning.
Automatic removal of deviation when fault happens and servo drive
OFF .The former is to eliminate the fault source, the latter is to avoid
servo OFF. There is warning when external given haven
’
t cancelde.
Does not automatic removal of deviation, adopt P1-34
way to clear. It need defining a DI terminal for 3
functions (P - the CLR)
Rising edge
clearing
Low level
clearing
High level
clearing
Falling level
clearin
g
P1-35
0
2
1
0
3
2
1
P1-34
NOTE
:
P1-34 definition has been effective, when
P1-35=0 or 1, it is still cleared through setting no.3 function
(
P-CLR
)
DI terminal.
P1-36
Position follow deviation alarm
threshold
Initail value
Unit
Communication
Address
25000
*256ppr
2124H
Control Mode
:
P
Range
:
0~65535
Data size
:
16bit
Display mode
:
Decimal system
Parameter function
:
Setting position follow deviation alarm threshold, more are available at P1-37Parameter function.
P1-37
Position follow deviation fault threshold
Initail value
Unit
Communication
Address
25000
*256ppr
2125H
Control Mode
:
P
Range
:
0~65535
Data size
:
16bit
Display mode
:
Decimal system
Parameter function
:
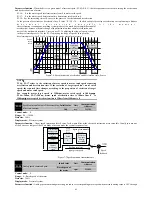
Setting position follow deviation fault threshold.
When position deviation corresponds the set, output respectively alarm and fault signal to response events.
Alarm signal
Fault signal
high level
effective
Low level
effective
P1-36
P1-37
position
deviation
puls
Figure7-9 Position followdeviation
alarm and fault threshold
NOTE
:
When P1-36=0 and P1-37=0, position follow deviation alarm and fault will be blocked.
P1-38
Torque reaches threshold value
Initail value
Unit
Communication
Address
0
%
2126H
Control Mode
:
T
Range
:
0
~
10.0
Data size
:
16bit
Display mode
:
Decimal system
Parameter function
:
When |setting torque—actual torque|
≤
P1-38, torque to events. If a DO terminal is
defined as no.13 function (/ Tcmp) at this
time, then the terminal output signal
effectively.
Figure7-10 Torque reaches threshold
P1-39
The highest speed setting
Initail value
Unit
Communication
Address
5000
rpm
2127H
Control Mode
:
P S T
/Tcmp
Low level
effective
P1-38
Given torque
torque/%
time/S
Actual
torque