





























76
7.4 P3-xx Internal multi-speed control parameters
If servo speed mode (P1-00 = 0) is adopted on the current , and the instruction source is internal multistage instruction (P1-05 = 4), you can
enable the function.
P3 group has about 32 parameters, which is divided into 16 groups, corresponding to a multi-speed command spd1 to spd16. Since P3-00,
every two parameters set period of time and speed multi-speed operation.
The following examples only spd1 group stated: P3-00 set running speed of spd1 command; P3-01 set running time of spd1 instruction. For
example, when P3-00 = 400, P3-01 = 1.0, corresponding to the instruction spd1 interpreted as motor operates 1s with 400rpm speed.
P3-00
Internal speed instruction register 1
Initail value
Unit
Communication
Address
0
rpm
0300H
2300H
Control Mode
:
S
Range
:
-rated speed
~
+ rated speed
Data size
:
16bit
Display mode
:
Decimal system
Parameter function
:
The first segment speed of internal multispeed
If when servo is speed mode (P1-00 = 0) on the current, and the instruction source is the internal value given (P1-05 = 0), this code
specifies speed. For example, if P3-00 = 400, after S-ON the motor has been to 400rpm.
P3-01
Internal speed instruction 1 running
time setting
Initail value Unit
Communication
Address
1.0
S
2301H
Control Mode
:
S
Range
:
0.1
~
6553.5
Data size
:
16bit
Display mode
:
Decimal system
Parameter function
:
The first segment running time of internal multispeed
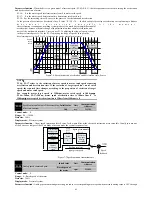
According to the instruction sequence running is illustrated below
speed/rpm
Spd1
...
P3-00
P3-01
Spd16
P3-02
Rated speed
P3-30
Time
P3-03
Spd2
0
P3-31
Figure7-18 Multi-speed operation
NOTE
:
1: If modify the parameters currently running segment, the modified parameters will not be
executed until the next time , it takes effect when you execute this segment, when adopt internal
multi-speed, and run with instruction sequence ( P1-05 = 4, P1-06 = 0 or 1).
2: Use an external terminal switching multispeed that P1-06 = 2, each of the internal speed
command running time parameter is invalid, servo motor speed depending on the state of the
corresponding segment external terminals. At the same time, the current speed value as long as
modifications,it will be executed immediately.
7.5 P4-xxTorque control parameter
P4-00
Internal digital torque
Initail value
Unit
Communication
Address
100.0
%
2400H
Control Mode
:
T
Range
:
-300.0
~
300.0
Data size
:
16bit
Display mode
:
Decimal system
Parameter function
:
When P1-18=0
时,
set the percentage of the motor output torque reference of the motor rated torque.
P4-01
Speed limit value during torque control
Initail value
Unit
Communication
Address
100
rpm
2401H
Control Mode
:
T
Range
:
0
~
motor rated speed







































































