




























20
Function
Description
Drive side DB15
Servo motor side
AMP plug
Aviation plug
Signal name
Pin
Pin
Pin
supply ground
Positive terminal
of serial signal
SD+
1
5
4
Negative terminal
of serial signal
SD-
3
6
7
Shield layer PE
PE
Shell
9
1
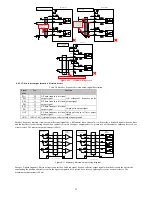
Table 4-3b 17-bit absolute encoder cable connection
Function
Description
Drive side DB15
Servo motor side
AMP plug
Aviation plug
Signal name
Pin
Pin
Pin
Encoder power
supply
+5V
5
1
2
Encoder power
supply ground
GND
10
2
3
Positive terminal
of serial signal
SD+
1
5
4
Negative terminal
of serial signal
SD-
3
6
7
Positive terminal
of external battery
VB+
7
14
Negative terminal
of external battery
VB-
8
15
Shield layer PE
PE
Shell
9
1
Table 4-3c 2500ppr non-wire-saving encoder cable connection
Function
Description
Drive side DB15
Servo motor side
AMP plug
Aviation plug
Signal name
Pin
Pin
Pin
Encoder signal Z +
Z+
1
7
6
Encoder signal U +
U+
2
6
10
Encoder signal V +
V+
3
10
11
Encoder signal W +
W+
4
11
12
Encoder supply 5V
+5V
5
2
2
Encoder signal Z-
Z-
6
5
9
Encoder signal U-
U-
7
8
13
Encoder signal V-
V-
8
12
14
Encoder signal W-
W-
9
15
15
Encoder power
supply ground
GND
10
3
3
Encoder signal B +
B+
11
4
5
Encoder signal B-
B-
12
14
8
Encoder signal A +
A+
13
9
4
Encoder signal A-
A-
14
13
7
Shielding layer PE
PE
Shell
1
1
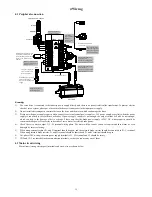
Remark for servo wiring
:
1)
Make sure the drive and the motor shielded layer are grounded; otherwise it will cause the drive error.
2)
Do not confuse GND and PE.
3)
Be sure that the differential signal can match the two cables of a twisted pair. For example, A + and A- is a set of differential signal, you
should use a twisted pair.
4)
Encoder cable routing must be separated from the power cable routing by at least 30cm or more.
4.4 CN4 Control signal terminal
Using the DB44 socket, CN4 signal terminal provides signals for communication with upper computer.
Signals include:
8 programmable digital inputs
4 programmable digital differential output