



























Operating Manual 90° ACTUSAFE CMF(S)QT
OM-ENGLISH-Failsafe-QT-16xx-V2.00-2022.03.01
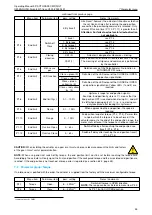
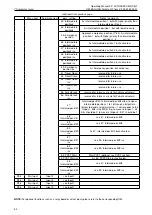
7 Parameter menu
continued from previous page
Menu item
Sub-menu item
poss. setting
Notes / Comments
4: By travel1
Like „travel“, however, the actuator still continues to drive
the set Overrun time after reaching the end position,
even when the positioning command is released. Only
relevant if Overrun time (P1.10, P1.11) is greater than 0.
Attention: For failsafe-actuators in failsafe-direction
not applicable.
P1.4
End limit
Switch-off
Close
1: travel
see P1.3
1: By torque
see P1.3
2: By torque1
see P1.3
3: By torque2
see P1.3
4: By travel1
see P1.3
P1.5
End limit
Closing
direction
CW (0)
Actuator is designed for clockwise = closing.
CCW (1)
Reverse direction of rotation! Counterclockwise = closing.
The crossing of all signals and commands is performed
by the controller.
P1.6
End limit
Rot. sense
pos.
0
Rotation sense of the Potentiometer. No function in
ACTUSMART CM series.
1
P1.7
End limit
LED function
Close = green (0)
Definition of the LED colour of the CLOSED or OPEN
end postion signalization.
Close = red (1)
Close = green,
yellow inv. (2)
Definition of the LED colour of the CLOSED or OPEN
end postion signalization. Yellow LEDs (1 and 2) are
inverted.
Close = red, yellow
inv. (3)
P1.8
End limit
End limit hyst.
0.1. . . 10.0%
Hysteresis range for end position signals:
Example: End position hysteresis 1% means that the
End position OFF is reached when closing 0%, and will
be left when opening only at 1%, i.e., a re-closing can
only take place after leaving this hysteresis.
P1.9
End limit
Ramp
0.1. . . 100%
When approaching the end position, the speed is
reduced.
P1.10
End limit
Range
0. . . 100%
End position range for torque (P1.3, P1.4). Permissible
range in which the torque is to be achieved. If the
actuator comes to the end of the end position range, the
motor shuts off even if the torque has not been reached.
P1.11
End limit
Overrun Open
0. . . 60 s
Switch-off delay after reaching the end position see
travel1 (P1.3, P1.4)
P1.12
End limit
Overrun Close
0. . . 60 s
Switch-off delay after reaching the end position travel1
(P1.3, P1.4)
CAUTION:
When installing the actuator on a gear or a thrust unit, please take into account the limits and factors
of the gear / thrust unit at parametrization.
NOTE:
When using end-limit switch-off by torque, the end position limit must be set before reaching the torque limit.
Accordingly, the actuator will only signal the final end position if the configured torque and the associated end position are
reached. If the end position is not reached, a torque error is reported (see section 6.2.2, page 35).
7.2
Parameter group: Torque
If no torque was specified with the order, the actuator is supplied from the factory with the maximum configurable torque.
Menu item
Sub-menu item
poss. setting
Notes / comments
P2.1
Torque
Open
8. . . 32 Nm
Switch-off torque in OPEN direction
NOTE
: The range can be restricted via menu item P2.3.
P2.2
Torque
Close
8. . . 32 Nm
As P2.1, but in CLOSED direction.
3)
representative for CM03
45
Содержание CM03
Страница 1: ...Operating Manual 90 ACTUSAFE CMF S QT OM ENGLISH Failsafe QT 16xx V2 00 2022 03 01 ...
Страница 97: ...CM03 FSQT ...
Страница 98: ...CM06 FSQT ...







































































