




























Input and Output Signals
Publication PUB091-003-00_0119
29 of 76
the torque exceeds the value set and the close limit switch has been
reached, or a new command is sent over the network.
Stop
With no other command present this digital command causes an
actuator motor that is running to stop.
Emergency Shut Down
A digital command that causes the actuator to drive to its
Emergency position. There are settings within the actuator to
determine if this is a closed, open or stay put action.
For SI and EH actuators, this should not be used for SIL applications.
The hard wired ESD input should be used.
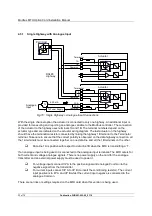
Relay Output DO-1 to DO-4
These 4 commands are used to energise and de-
energise the internal relays on the additional relay board in an IQ /
IQT or SI / EH actuator. (These outputs are referred to as S5-S8 in the
standard actuator documentation when there is no MFU in the
actuator.) The resulting outputs can be used for operating other
equipment such as a pump or indication light. The IQ/IQT actuator is
not able to control these relays directly from the main board when the
MFU is fitted. They will maintain their last state if power is removed
from the actuator. On restoration of power the relays will be reset to
their de-energised condition and the coils will report ‘0’.
Analogue Position Demand
This function is only available over the Modbus RS-485
network. To initiate Analogue Position Control a value must be written
the Position DV register (range 0-100.0%, resolution 0.1%). The valve
will open to the appropriate amount and stop in that position (within
the deadband setting). If a subsequent digital command to open or
close the valve is issued, from any source, this will take priority over
the analogue position command. Once the setpoint is reached the
positioning controller is switched off. A new write to the Position DV
register will initiate positioning mode once more. The register location
is listed later in this manual.
Provided limited range positioning is not invoked the values 0% and
100% written to this register produce a special case output where the
command is revised so as to fully close the valve to its tight shut off
position (0%) and fully open the valve (100%).
Hard Wired Stop
The hard wired stop input acts as a change of state input. If the
actuator is moving, opening the Stop input will stop the actuator. If the
Stop input is already open and a Modbus command is sent to the
actuator, the Modbus command will be initiated. To stop the actuator
the hard wired input must be closed and opened again.
Note:
Many IQ multi-turn actuators are set to open until the open limit switch is reached and,
close until the closing on torque switch trips, but it is dependent on the type of valve.
The IQT and Q normally operate 90-degree valves, use stop bolts on the actuator or
gearbox, and stop when these are reached. The control room indication is always taken
from the end of travel limit switch settings







































































