





























Robotiq FT-150/300 Sensor
Instruction Manual
Robotiq inc. © 2016
18
1.
3.6 Calibration procedure
Why do I need to calibrate the installation offset of my FT-150 / FT-300 ?
The sensor outputs the force and moment data according to a reference, i.e. a zero value. In order to compensate
for any deviation of this reference, Robotiq provides a new feature which allows the sensor to automatically compute
and compensate the installation offset, the weight of the tool and its center of mass.
Warning
The sensor must be re-calibrated after each uninstall / install on the robot. Mounting screws will
induce internal stress that needs to be compensated for. Not doing so will significantly affect the
sensor signal.
How does it work?
The procedure requires moving the robot in three configurations for which each orientation of the tool is different.
Using an internal accelerometer, the sensor is then able to associate the measurements corresponding to the tool
alone for each orientation. After the procedure is completed, the sensor will output the force and moment measured
without the effect of the weight of the tool and the installation offset.
3.6.1 Calibration procedure with Universal Robots
Info
You need the Universal Robots software package installed first, see
package download and installation.
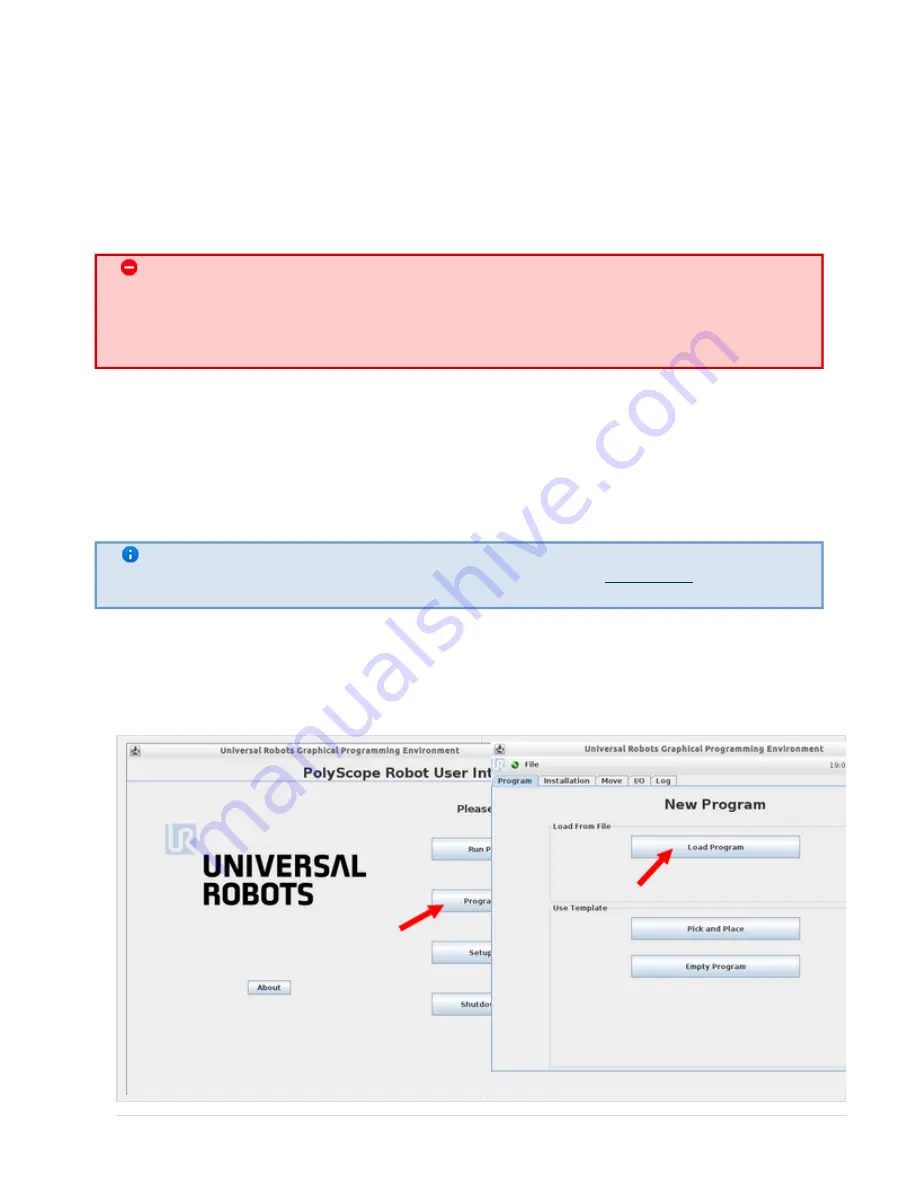
To calibrate your FT Sensor :
Inside Polyscope, load the program, calib_tool_.urp, located in the folder called: Sensor (for a CB2 robot, use
program calib_tool_CB2.urp).







































































