




























IP Address of the Compute Box/Eye
Box
IP Address of the Robot/Computer
The IP address of the Compute
Box/Eye Box is fixed 192.168.1.1.
This IP address cannot be changed.
The Compute Box/Eye Box will automatically assign an
IP address to the connected robot/computer if it was
configured to obtain an IP address automatically.
NOTE:
The assigned IP address range is
192.168.1.100-105 (with subnet mask
255.255.255.0).
If the Compute Box/Eye Box is used in a
company network where a DHCP server
is already in use, it is recommended to
use Advanced mode.
In this mode, the DHCP server of the Compute Box/Eye Box is enabled.
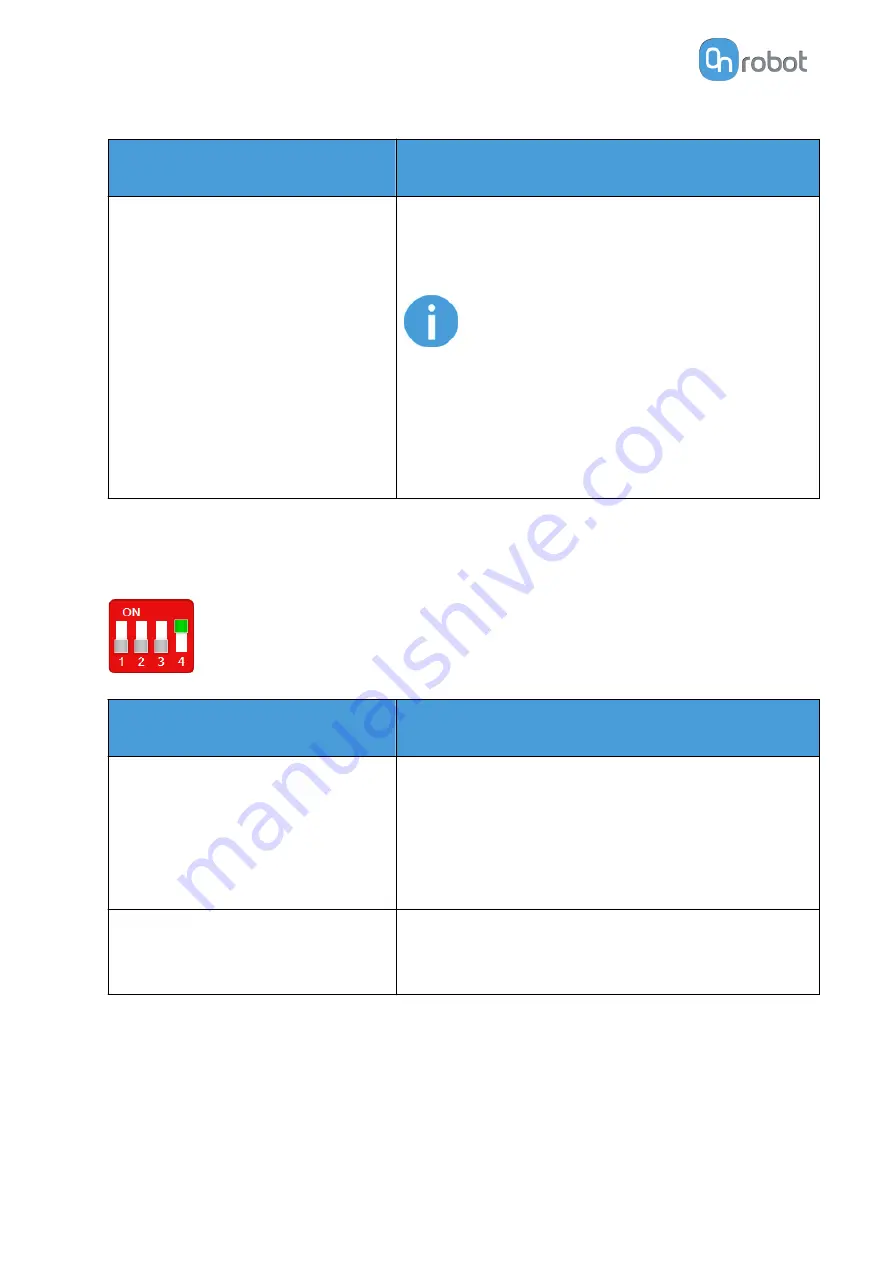
Advanced mode (any static or dynamic IP/subnet mask)
Set the DIP switch 3 to OFF and the DIP switch 4 to ON position and cycle the
power so the changes will take effect.
IP Address of the Compute Box/Eye
box
IP Address of the Robot/Computer
Case 1: Static IP address
The IP address 192.168.1.1 is already
in use in your network or a different
subnet needs to be configured.
The Compute Box/Eye Box will not assign an IP address
to the robot/computer.
Set the IP address of the robot/computer manually.
Make sure to have a matching IP setting to your robot/
computer network for a proper communication. Use the
same subnet but different IP address.
Case 2: Dynamic IP address *
The IP address of the robot/computer is set dynamically.
An external DHCP server assigns the IP address to the
robot/computer.
* By default, the IP address of the Compute Box/Eye Box is set to Dynamic IP.
The IP address of the Compute Box/Eye Box can be set to any value by using the Web Client.
For more details, see section Web Client: Configuration Menu. Under Network settings, set
the Network mode to either Static IP or Dynamic IP.
In this mode, the DHCP server of the Compute Box/Eye Box is disabled.
ADDITIONAL SOFTWARE OPTIONS
43
Содержание 2FGP20
Страница 1: ...USER MANUAL FOR UR ROBOTS v1 13 0 Original Instructions...
Страница 55: ...On the Users tab click on the Add new user button to add more users ADDITIONAL SOFTWARE OPTIONS 55...
Страница 62: ...Illustration Pad position Maximum force N 2 200 3 100 4 400 HARDWARE SPECIFICATION 62...
Страница 71: ...8 2 3 Tools 8 2 3 1 2FGP20 All dimensions are in mm and inches HARDWARE SPECIFICATION 71...
Страница 79: ...12 Certifications CERTIFICATIONS 79...
Страница 80: ...12 1 EMC 12 2 2FGP20 Environment CERTIFICATIONS 80...
Страница 81: ...12 3 Declaration of Incorporation 12 3 1 2FGP20 CERTIFICATIONS 81...







































































