





























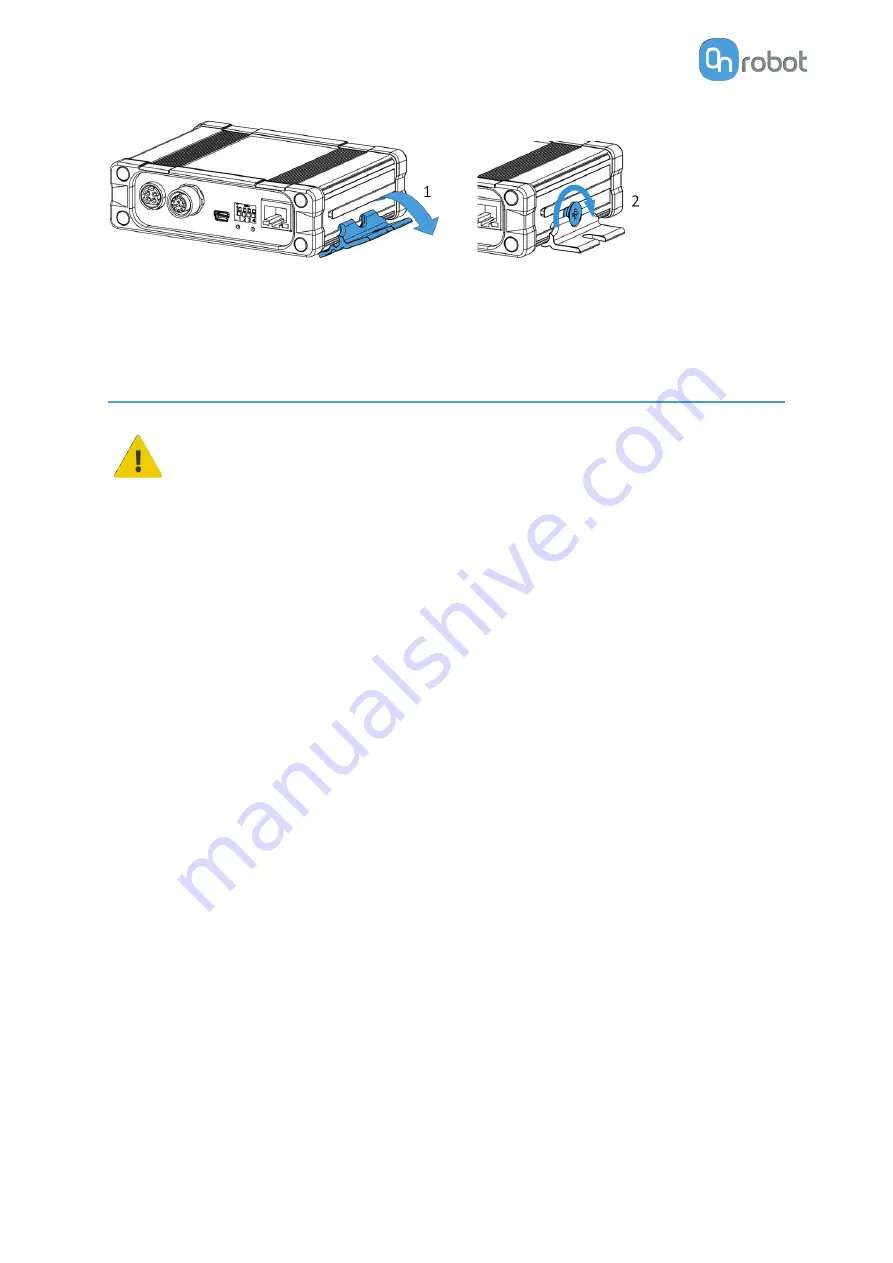
Do the following on both sides of the Compute Box:
1. Hook the Clip-on Bracket to the rail on the side of the Compute Box and then flip it down.
2. Fasten the Clip-on Bracket with the plastic srew.
4.4. Wiring via Tool Connector
DANGER:
Use only original OnRobot tool data cables.
The following devices are supported in the operation mode via tool connector:
•
2FG7
•
2FGP20
•
3FG15 (Only for e-Series)
•
MG10
•
RG2 / RG6
•
SG
•
VG10 / VGC10
For e-Series
Connect the Quick Changer to the UR's tool connector.
HW INSTALLATION
15
Содержание 2FGP20
Страница 1: ...USER MANUAL FOR UR ROBOTS v1 13 0 Original Instructions...
Страница 55: ...On the Users tab click on the Add new user button to add more users ADDITIONAL SOFTWARE OPTIONS 55...
Страница 62: ...Illustration Pad position Maximum force N 2 200 3 100 4 400 HARDWARE SPECIFICATION 62...
Страница 71: ...8 2 3 Tools 8 2 3 1 2FGP20 All dimensions are in mm and inches HARDWARE SPECIFICATION 71...
Страница 79: ...12 Certifications CERTIFICATIONS 79...
Страница 80: ...12 1 EMC 12 2 2FGP20 Environment CERTIFICATIONS 80...
Страница 81: ...12 3 Declaration of Incorporation 12 3 1 2FGP20 CERTIFICATIONS 81...































































