



























EDH0162En1040 – 06/99
4.24
MM4005
Motion Control Tutorial
4.6.1
Stepper Motors
The main characteristic of a stepper motor is that each motion cycle has a
number of stable positions. This means that, if current is applied to one of
its windings (called phases), the rotor will try to find one of these stable
points and stay there. In order to make a motion, another phase must be
energized which, in turn, will find a new stable point, thus making a small
incremental move - a step.
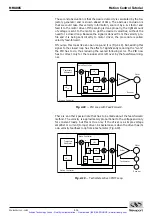
Fig. 4.31
— Stepper Motor Operation.
Fig. 4.31 shows the basics of a stepper motor. When the winding is ener-
gized, the magnetic flux will turn the rotor until the rotor and stator teeth
line up. This is true if the rotor core is made out of soft iron. Regardless of
the current polarity, the stator will try to pull-in the closest rotor tooth.
But, if the rotor is a permanent magnet, depending on the current polarity,
the stator will pull or push the rotor tooth. This is a major distinction
between two different stepper motor technologies: variable reluctance and
permanent magnet motors. The variable reluctance motors are usually
small, low cost, large step angle stepper motors. The permanent magnet
technology is used for larger, high precision motors.
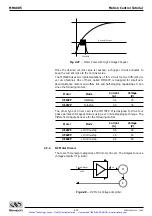
The stepper motor advances to a new stable position by means of several
stator phases that have the teeth slightly offset from each other. To illus-
trate this, Fig. 4.32 shows a stepper motor with four phases and, to make it
easier to follow, it is drawn in a linear fashion (as a linear stepper motor).
Fig. 4.32
— Four-Phase Stepper Motor.
The four phases, from A to D, are energized one at a time (phase A is
shown twice). The rotor teeth line up with the first energized phase, A. If
the current to phase A is turned off and B is energized next, the closest
rotor tooth to phase B will be pulled in and the motor moves one step for-
ward.
If, on the other hand, the next energized phase is D, the closest rotor tooth
is in the opposite direction, thus making the motor to move in reverse.
Phase C cannot be energized immediately after A because it is exactly
between two teeth, so the direction of movement is indeterminate.
To move in one direction, the current in the four phases must have the fol-
lowing timing diagram:
A
B
C
D
A
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
Содержание MM4005
Страница 360: ...Section 7 Servo Tuning Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com ...
Страница 368: ...Section 8 Appendices Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com ...
Страница 405: ...EDH0162En1040 06 99 8 36 Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com ...
Страница 406: ...Section 9 Index Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com ...







































































