



























4.17
EDH0162En1040 – 06/99
MM4005
Motion Control Tutorial
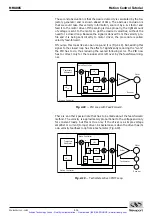
The tachometer is a device that outputs a voltage proportional with the
velocity. Using its signal, the driver can maintain the velocity to be propor-
tional to the control signal. If such a driver is used with a velocity feed-for-
ward algorithm, by properly tuning the Kvff parameter, the feed-forward
signal could perform an excellent job, leaving very little for the PID loop to
do.
The MM4005 uses this type of velocity control driver to get the highest per-
formance possible. In addition, since tachometers are expensive and many
times impractical or even impossible to use, the driver has a special cir-
cuitry tuned to each individual motor type that can “calculate” the velocity.
The results are similar to a tachometer feedback but at a fraction of a cost.
The drawback is that each motor type needs a specially tuned driver card
but, because it is designed to work in a pre-defined system using known
motion devices, its operation is totally transparent to the user. All driver
cards are pre-tuned and clearly labeled and no adjustments are required
(or allowed).
Motion Profiles
When talking about motion commands we refer to certain strings sent to a
motion controller that will initiate a certain action, usually a motion. There
are a number of common motion commands which are identified by name.
The following paragraphs describe a few of them.
4.4.1
Move
A move is a point-to-point motion. On execution of a move motion com-
mand, the motion device moves from the current position to a desired des-
tination. The destination can be specified either as an absolute position or
as a relative distance from the current position.
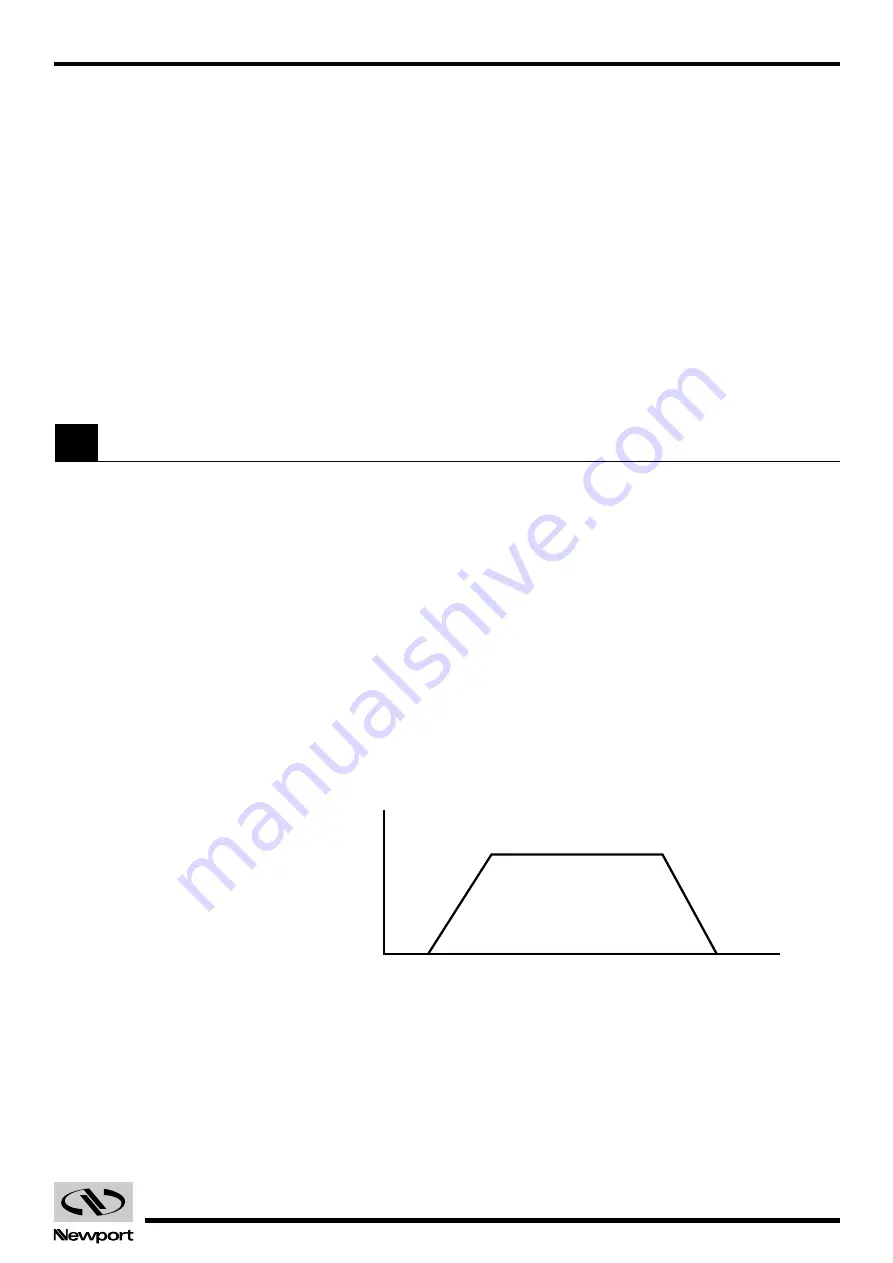
When executing a move command, the motion device will accelerate until
the velocity reaches a pre-defined value. Then, at the proper time, it will
start decelerating so that when the motor stops, the device is at the cor-
rect position. The velocity plot of this type of motion will have a trape-
zoidal shape (Fig. 4.20). For this reason, this type of motion is called a
trapezoidal motion.
Fig. 4.20
— Trapezoidal Motion Profile.
The position and acceleration profiles relative to the velocity are shown in
Fig. 4.21.
Time
Desired Velocity
4.4
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
Содержание MM4005
Страница 360: ...Section 7 Servo Tuning Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com ...
Страница 368: ...Section 8 Appendices Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com ...
Страница 405: ...EDH0162En1040 06 99 8 36 Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com ...
Страница 406: ...Section 9 Index Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com ...







































































