





























Page 17 of 97
Title FireVu Detector Standalone Installation Manual
NetVu Ltd.
No 1 Thellow Heath Park, Northwich Road, Northwich, Cheshire. CW9 6JB
If the risk is an identified item or area within the total area being monitored then the detector view
should be set to maximise the size of that defined area whilst ensuring that all the required
monitored items fit within the field of view. This requirement often conflicts with any CCTV
requirements for a camera and as a result NetVu Ltd. advise against detectors being used for a dual
security and Visual Smoke Detection (VSD) purpose.
Consideration must be given to any potential obstructions to the “risk area” being monitored.
These may be either permanent, (pipe-work for example), or temporary, (vehicles or plant parked in
times of non-operation). Although smoke will rise above and around such obstacles, it will reduce
the FireVu’s ability to identify it and increase the detection time, and may remove all chances of
seeing any flame. Consequently, wherever possible, the detector should be given a clear direct line
of sight to the “risk area”.
If the risk is identified as anywhere within the area then a sufficient number of detectors need to be
used so that the entire area falls within the “useable” field of view of at least one detector and
at
least two if a “double knock” requirement is specified. As a minimum, neighbouring detector views
MUST overlap to ensure the entire area is monitored.
It is advisable to have each monitored area covered from more than one aspect, and ideally from
opposite sides, so that the area underneath a detector is covered by an opposing detector view.
Note:
NetVu Ltd. recommend that wherever possible all parts of a risk area be covered by two
detectors so “double knock” alarming can be utilised reducing the c
hances of a false alarm. This
also ensures areas behind or below detectors are covered and that if a detector is obscured the
area it is covering is still being monitored by another detector.
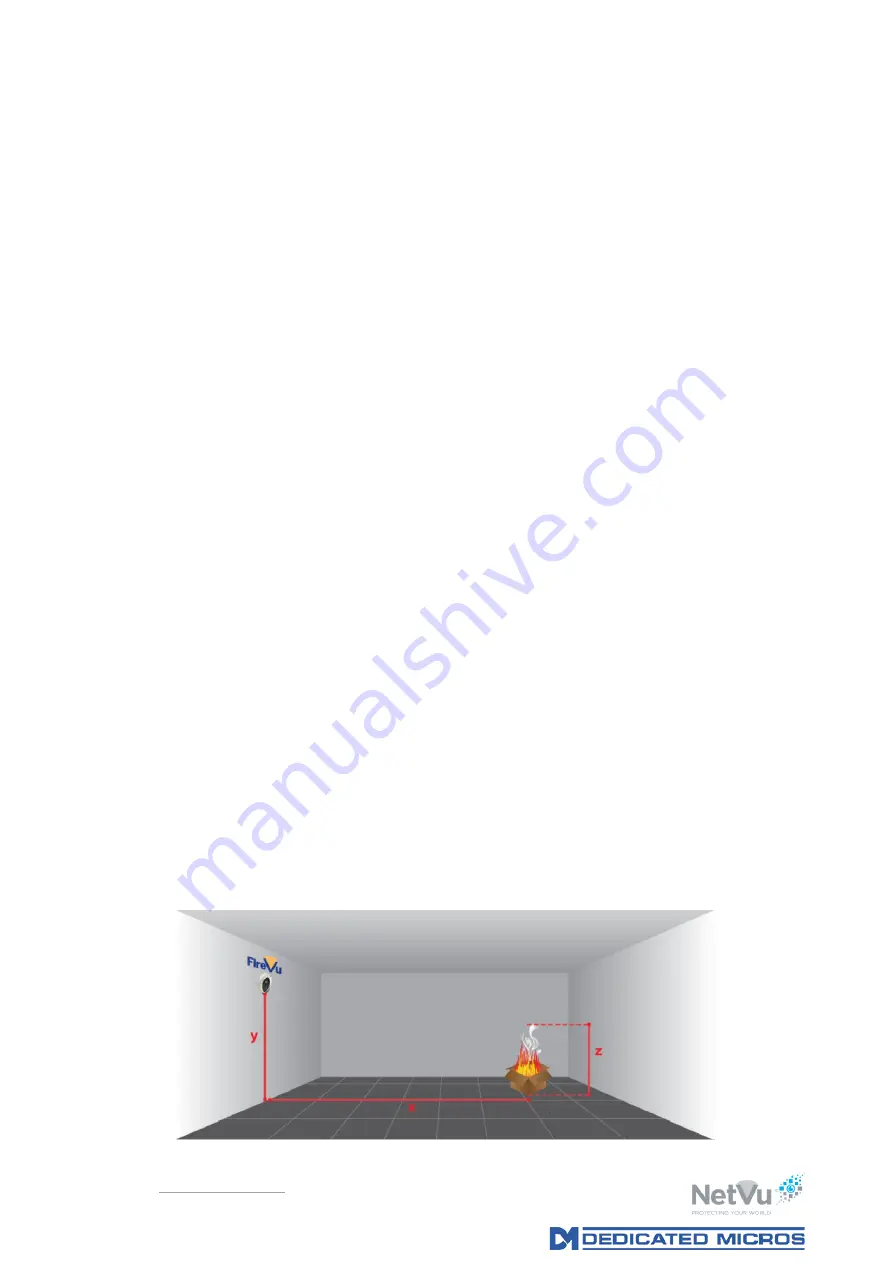
The “useable” field of view of the detector is that area within
which a fire, or cloud of smoke, is
considered large enough to result in an alarm. For flame detection, the flame needs to occupy only
1% of the height of the detector’s view. In instances where flashing beacon are in use, or other
fluctuating light sources oblige a reduction in the flame detection threshold to prevent false
alarms, a flame will need to occupy 2% to 3% of the height of the detector’s view.
For smoke detection, the smoke cloud needs to occupy at least 10% of the height of the detector’s
view. A cloud of smoke smaller than 10% of the height of the field of view of the detector may not
be detected by the system. As the further away an incident is the smaller it appears, even a large
plume of smoke may not be detected if it is so far away from the detector that it occupies less than
10% of the detector’s view height.