





























Semantics for Command and Response Messages
Moog Animatics Class 6 EtherNet/IP Guide, Rev. B
Page 52 of 160
Semantics for Command and Response Messages
This section provides semantic information for the command and response messages in the
previous tables.
Command Message Semantics
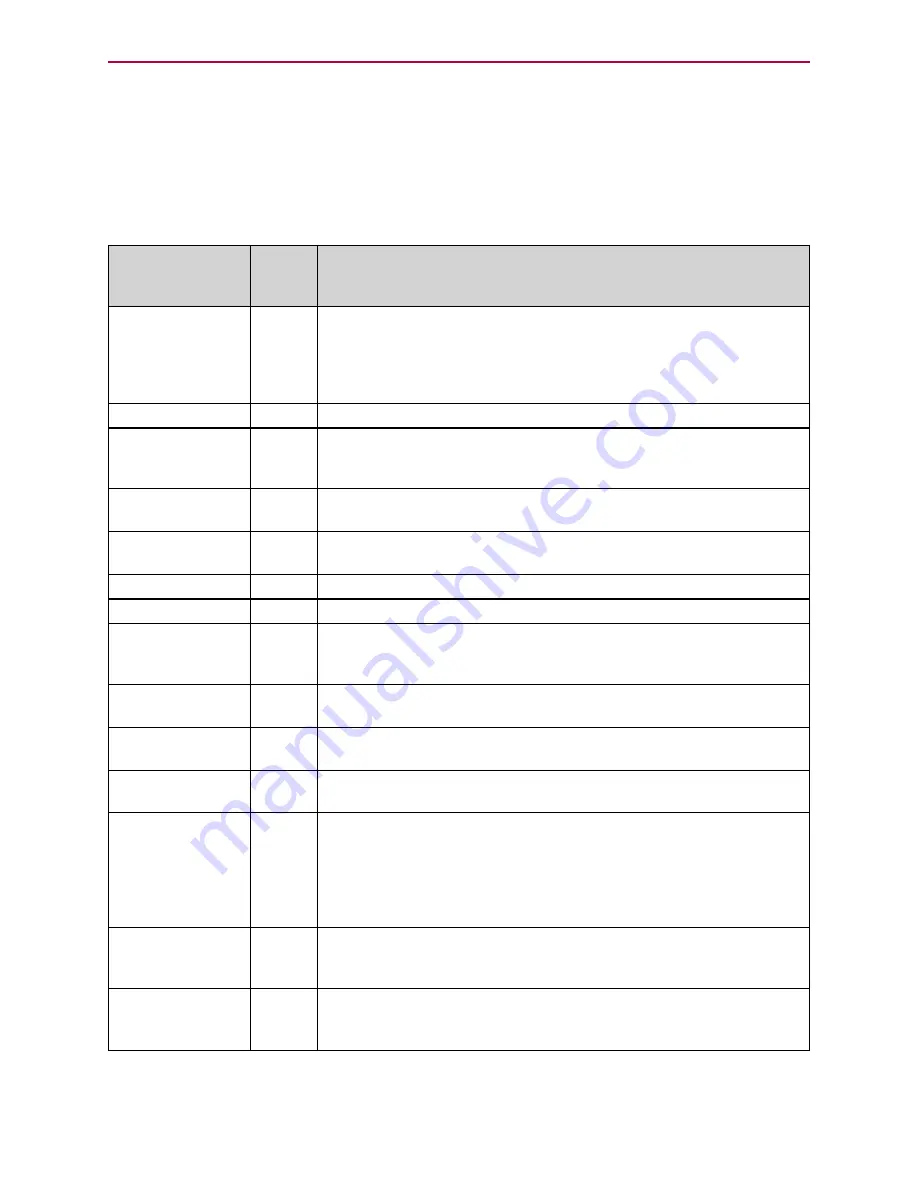
This following table provides semantic information for the command messages.
Item
Cmd
Msg
Type
Description
Load Data/ Start
Profile
Set from zero to one to load command data. The transition of
this bit from zero to one will also start a Profile Move when the
command message type contained in the command message
field is the message type that starts a Profile Move for the mode
selected.
Start Block
Not supported.
Incremental
This bit is used to define the position value as either absolute or
incremental. 0 = absolute position value and 1 = incremental
position value.
Direction (V.
Mode)
This bit is used to control the direction of the motor in Velocity
mode. 1 = forward, positive; 0 = reverse, negative.
Smooth Stop
This bit is used to bring the motor to a controlled stop at the cur-
rently implemented deceleration rate.
Hard Stop
This bit is used to bring the motor to an immediate stop.
Registration Arm
Not supported.
Enable
This bit is used to control the enable output. Clearing this bit will
set the enable output inactive and the currently executing motion
profile will be aborted.
Block #
This byte defines the block number to be executed when the
Start Block bit transitions from zero to one.
Command Mes-
sage Type
This field defines the Command Message Type
Response Mes-
sage Type
This field defines the Response Message Type
Command Axis
Number
These three bits define the Consumed Axis Connection attribute
of the Position Controller Supervisor class. This attribute value
specifies the instance number of all of the axis objects whose
data are contained in the I/O command message. The SmartMo-
tor is a single-axis device. Therefore, only axis 1 is used, which
can be specified by either 0 or 1.
Target Position
0x01
This double word defines the Profile Move’s Target Position in
position units, when the Load Data /Start Profile bit transitions
from zero to one.
Target Velocity
0x02
This double word defines the Profile Move’s Target Velocity in
profile units, when the Load Data /Start Profile bit transitions
from zero to one
Содержание SmartMotor SM34165MT-IP
Страница 16: ......
Страница 24: ......
Страница 30: ......
Страница 36: ......
Страница 98: ......
Страница 126: ......
Страница 153: ...SmartMotor AOI Example Moog Animatics Class 6 EtherNet IP Guide Rev B Page 153 of 160...
Страница 154: ......
Страница 158: ......
Страница 159: ......
Страница 160: ...PN SC80100010 001 Rev B...







































































