





























EtherCAT interface
Leuze electronic GmbH + Co. KG
AMS 338
i
67
TNT
35/7-2
4V
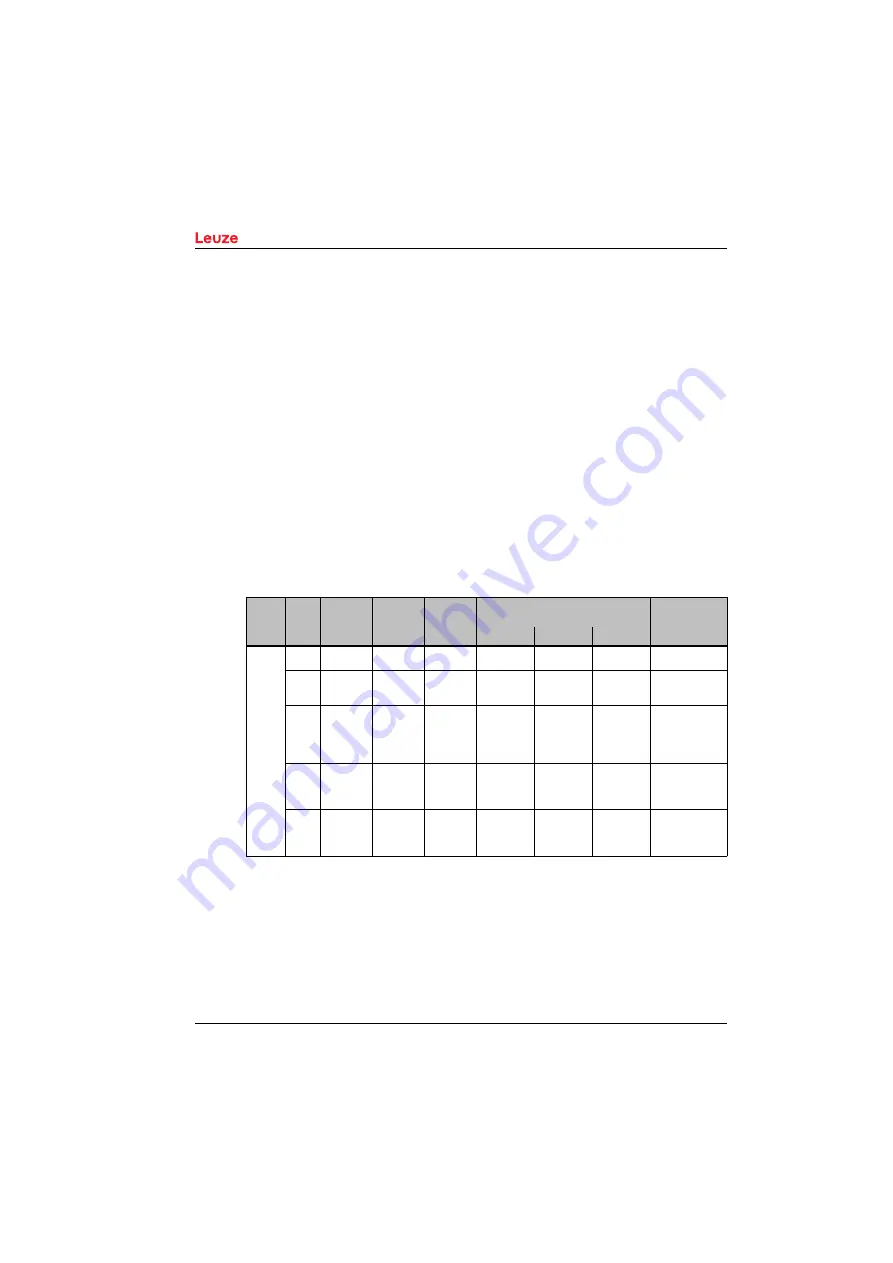
Object 2021
h
Configuration of velocity monitoring 1
Objects 2021
h
to 2024
h
enable comparison of the velocity currently measured by the
AMS 338
i
, with a limit value stored in the respective object.
Note regarding velocity monitoring 1 - 4 and dynamic velocity monitoring
If range start and range end are identical, velocity monitoring is active over the entire
traversing range.
If a direction-dependent limit value check is activated via the Direction selection parameter,
the values of position start and position end also define the direction. The check is always
performed from position start to position end. For example, if the position start is "5500" and
the position end is "5000", the direction-dependent check is only performed in the direction
from "5500" to "5000". The limit value is not active in the opposite direction.
If the check is independent of direction, the order of position start and position end is irrele
-
vant. Depending on the selected switching type, if the value is above or below the defined
limits, the limit value status in object 2026
h
is set and, if configured, the switching output is
set via object 2050
h
or 2051
h
.
Sub-index 01
Bit 0: Switching type
0 = Velocity above upper limit
1 = Velocity below lower limit
Index
Sub-
index
Name
Data type
Access
Value range
Comment
(hex)
(hex)
Minimum
Maximum
Default
2021
01
Limit value
check
u8
rw
0
7
0
See below
02
Velocity
limit
value 1
u16
rw
0
20000
0
mm/s or
(in/100)/s
03
Hystere
-
sis of
velocity
limit value
1
u16
rw
0
20000
100
mm/s or
(in/100)/s
04
Monitor
-
ing as of
position
start
int 32
rw
-999999
999999
0
mm or
in/100
05
Monitor
-
ing up to
position
end
int 32
rw
-999999
999999
0
mm or
in/100







































































