





























GB - 25
CP-Parameter
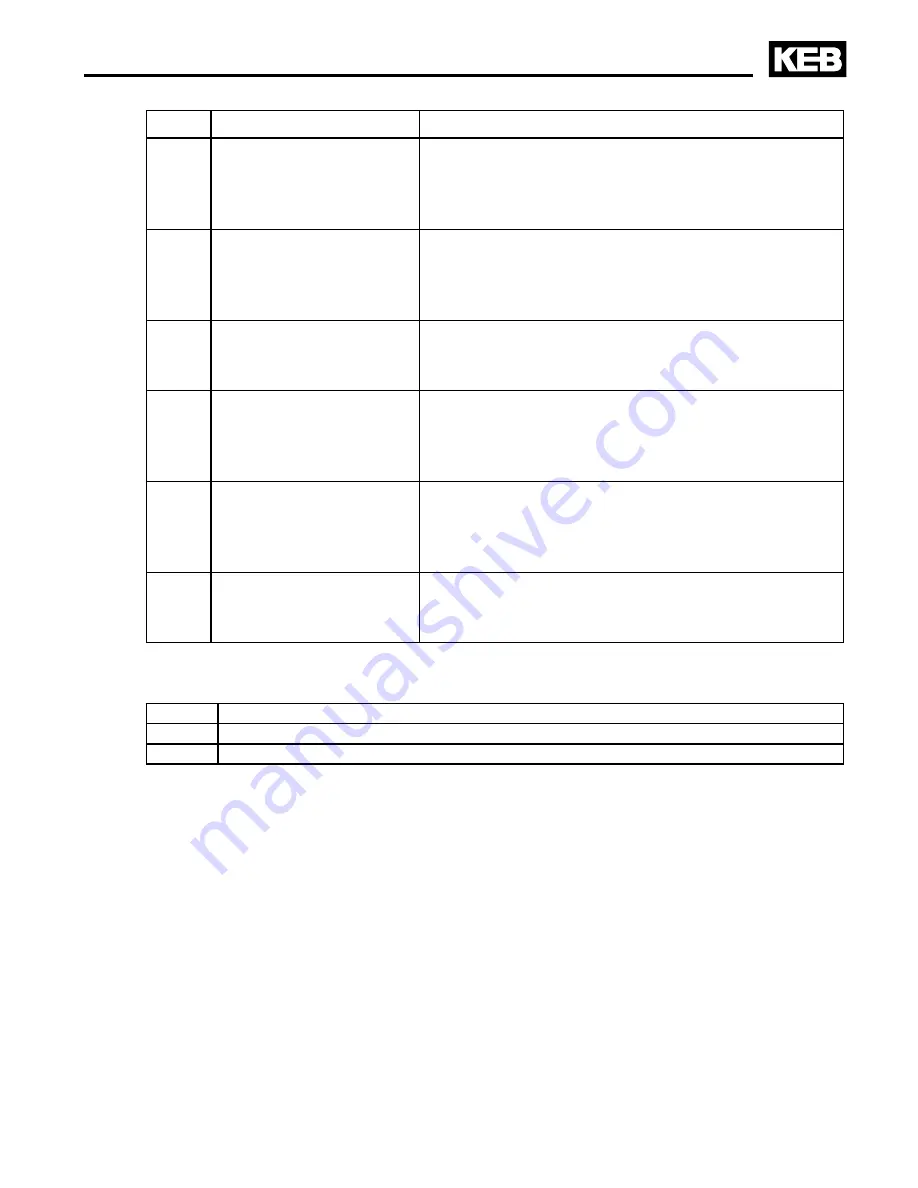
CP.27 Response
Description
1
Quick stopping,
modulation off,
restart after reset
Status message A.xx
Fast stop - switch off of the modulation after reaching
0 Hz. Correct the error for the restart and activate
reset. The drive remains in condition fast stop until a
reset signal is recognized.
2
Quick stopping,
holding torque,
restart after reset
Status message A.xx
Fast stop - holding torque on reaching 0 Hz. Correct
the error for the restart and activate reset. The drive
remains in condition fast stop until a reset signal is
recognized.
3
modulation off,
automatic restart
Status message A.xx
Immediate switch off of the modulation; the drive
returns automatically to normal operation, as soon
as the fault no longer exists.
4
Quick stopping,
modulation off,
automatic restart
Status message A.xx
Fast stop - switch off of the modulation after reaching
0 Hz. the drive returns automatically to normal opera
-
tion, as soon as the fault no longer exists.
5
Quick stopping,
holding torque,
automatic restart
Status message A.xx
Fast stop - holding torque on reaching 0 Hz. the drive
returns automatically to normal operation, as soon as
the fault no longer exists.
6
Warning signal by digital
output,
no message
No effect to the drive. Error is being ignored. Switching
conditions (CP.32 and CP.33) value „10“ are set.
CP.28 Motor protection / mode
The cooling mode of the motor is adjusted with these programmable parameters.
Value Condition
0
Motor with separate cooling
1
Motor with self-cooling
For self-ventilated motors the tripping times decrease with the frequency of the motor. The
motor protective function acts integrating, i.e. times with overload on the motor are added,
times with underload are substracted. After triggering the motor protective function, the new
tripping time is reduced to 1/4 of the specified value, if the motor has not been operated for
an appropriate time with underload.
CP.29 Motor protection / rated current
This parameter specifies the rated current (= 100% utilization) for the motor protective
function. The motor protection-load is calculated as follows:
Inverter apparent current (CP.04)
Motor protection load
=
–––––––––––––––––––––––––
Motor protection / rated current (CP.29)







































































