





























Chapter 7 Usage of Various Functions
7-
ొ
There are several methods to avoid the windup of actuator. The most popular two methods are adding another
feedback system to actuator, and using the model of actuator. The Fig. 2-13 shows the block diagram of the anti-
windup control system using the actuator model.
As shown in the Fig. 2-13, the anti-windup system feedback the multiplication of gain (1/Tt) and Es to the input of
integral term. The Es is obtained as the difference value between actuator output (U) and manipulation value of PID
controller (MV). The Tt of the feedback gain is tracking time constant, and it is in inverse proportion with the
resetting speed of integral term. Smaller Tt will cancel the windup of actuator faster, but too small Tt can cause anti-
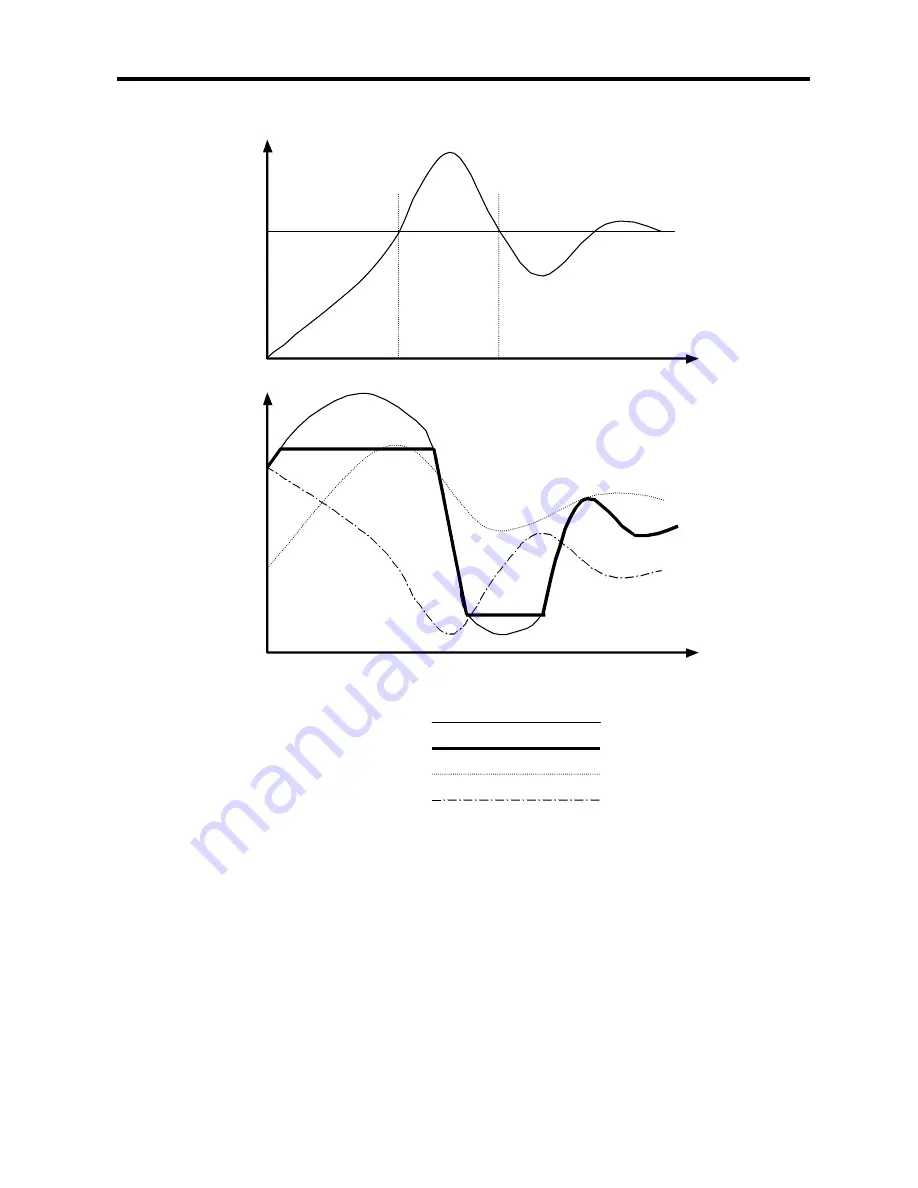
windup operation in derivative operation. The Fig. 2-14 shows several Tt value and PV in the PI control system.
PV
SV
Time
PV
MV
Time
MV (without windup)
MV (with windup)
Integral term
Proportional term
Содержание K7 Series
Страница 1: ...User s Manual Programmable Logic Controller IMO K7 IMO Precision Controls...
Страница 21: ...Chapter 4 Names of Parts 4 4 1 2 30 points base unit 4 1 3 40 points base unit 4 1 4 60 points base unit...
Страница 57: ...Chapter 6 Input and Output Modules 6 3 40 point base unit 4 60 point base unit DC24V DC24V DC24V DC24V...
Страница 166: ...Chapter8 Communication Function 8 43 Set parameters like the following table and click OK button Program...
Страница 189: ...Chapter 8 Communication Function 8 66 You can see the framelist which is designated Click OK button...
Страница 234: ......







































































