


























4–238
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
PROTECTION
CHAPTER 4: SETPOINTS
Out-of-step (78)
The Out-of-step element provides an out-of-step (loss-of-synchronism or pole slip) tripping
function for motors. The element measures the positive-sequence apparent impedance,
and traces its locus with respect to a single blinder operating characteristic with an offset
mho supervisory. The purpose of the supervisory mho is to permit tripping for swings that
pass through the motor and a limited portion of the system, but to prevent operation on
stable swings that pass through both blinders and outside the mho characteristic.
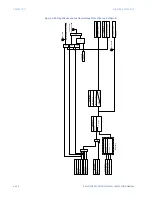
The out-of-step tripping feature operates as follows: The trip sequence identifies unstable
power swings by determining whether the impedance locus enters one blinder, spends a
finite time between the left and right blinder characteristics, and then exits the opposite
blinder. The out-of-step trip process is supervised by a mho characteristic. If the locus
enters the left blinder, right blinder and mho characteristic (indicated by the AND operation
of OOS LFT BLD PKP and OOS RGT BLD PKP FlexLogic operands) for an interval longer than
PICKUP DELAY, the timing out signal (OOS TIMER PKP FlexLogic operand) is established.
After the PICKUP DELAY timer times out, latch 1 is set as long as the impedance stays
within the mho characteristic. If afterwards, at any time (given the impedance stays
between the two blinders characteristic), the locus exits from the opposite blinder, latch 2
is set as long as the impedance stays inside the mho characteristic. The element is now
ready to trip. If the "BLINDER EXIT" trip mode is selected, the OOS OP operand is set
immediately and sealed-in for the interval set by the SEAL-IN DELAY. If the "MHO EXIT" trip
mode is selected, the element waits until the impedance locus leaves the mho
characteristic, and then the OOS OP operand is set and sealed-in.
The element is set to use the single blinder characteristic with a supervisory mho as
illustrated below.
The FlexLogic output operands for the out-of-step element are described as follows:
•
The OOS Lft Bld PKP, OOS Rgt Bld PKP, and OOS Timer PKP FlexLogic operands are
auxiliary operands that can be used to facilitate testing and special applications.
•
The OOS OP FlexLogic operand can be used to trip the circuit breaker to isolate the
loss-of-synchronism motor.
Follow these steps for a typical setting procedure of the out-of-step element:
1.
Carry out detailed transient stability studies for the overall system.
Содержание 869
Страница 10: ...VIII 869 MOTOR PROTECTION SYSTEM INSTRUCTION MANUAL ...
Страница 48: ...1 38 869 MOTOR PROTECTION SYSTEM INSTRUCTION MANUAL FOR FURTHER ASSISTANCE CHAPTER 1 INTRODUCTION ...
Страница 78: ...2 30 869 MOTOR PROTECTION SYSTEM INSTRUCTION MANUAL ELECTRICAL INSTALLATION CHAPTER 2 INSTALLATION ...
Страница 127: ...CHAPTER 3 INTERFACES SOFTWARE INTERFACE 869 MOTOR PROTECTION SYSTEM INSTRUCTION MANUAL 3 49 ...
Страница 129: ...CHAPTER 3 INTERFACES SOFTWARE INTERFACE 869 MOTOR PROTECTION SYSTEM INSTRUCTION MANUAL 3 51 ...
Страница 538: ...4 406 869 MOTOR PROTECTION SYSTEM INSTRUCTION MANUAL TESTING CHAPTER 4 SETPOINTS ...
Страница 578: ...6 22 869 MOTOR PROTECTION SYSTEM INSTRUCTION MANUAL FLEXELEMENTS CHAPTER 6 METERING ...
Страница 592: ...7 14 869 MOTOR PROTECTION SYSTEM INSTRUCTION MANUAL CLEAR RECORDS CHAPTER 7 RECORDS ...







































































