





























Website
29
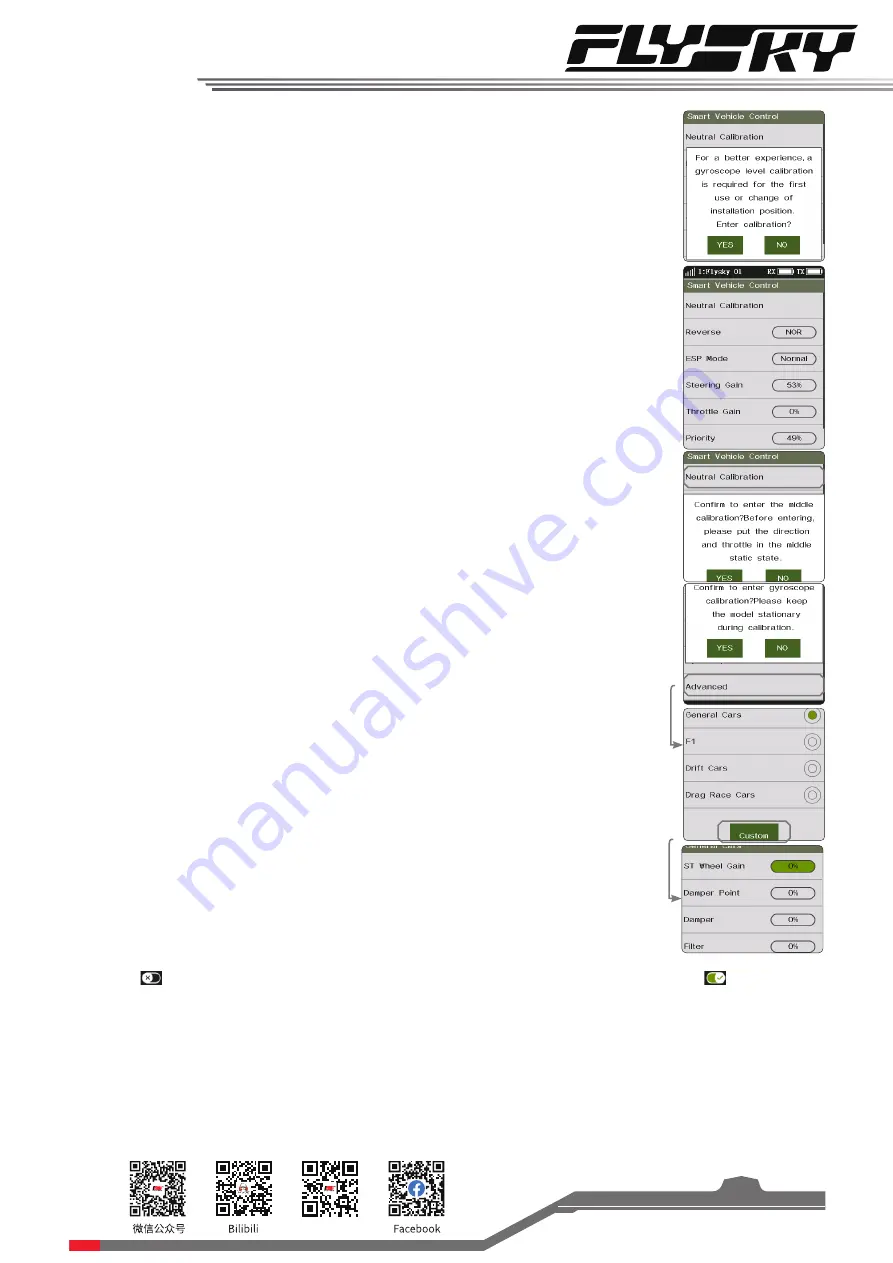
Setup:
1.
Click the
icon to enable this function. When this function is enabled, the icon will change to
.
•
If the gyroscope is not connected, this function cannot be activated, and the system prompts "The current
receiver is not properly connected to the gyroscope".
2.
Click [Neutral calibration]. A pop-up box will appear "Are you sure you want to enter neutral calibration? Put
the steering and throttle in the neutral stationary state before entering". Click "Yes". The transmitter enters the
calibration state. The system prompts successful calibration with sound reminder.
3.
If you want to change the direction of action, please click [Reverse]. If the function is set to reverse, it will show
"Reverse";
•
The method of replacing EPS is the same as above.
[Neutral Calibration]: Used for gyroscope to calibrate steering and throttle neutral to make the
best driving condition when the vehicle is driving normally.
•
Before enabling the intelligent vehicle control function, you need to adjust the vehicle's
steering servo volume, neutral trim and throttle neutral to the best driving condition. After
completion, start the [Smart Vehicle Control] function for neutral calibration. Every time you
change the trim or throttle curve, you need to calibrate the neutral position. The steering
throttle should be placed in the neutral stationary state during the calibration process.
[Reverse]: You can set the positive and negative direction of the gyroscope in the mix-control
of the direction channel.
[ESP Mode]: Used for model assisted stability. Two modes are available: normal/lock.
•
[Normal]: When the vehicle is yawing or steering, the gyroscope automatically provides an
opposite compensation to control the servo to keep it stable or prevent drifting according to
the angular velocity generated.
•
[Lock]: If the steering wheel is return-to-center, the gyroscope will control the servo in the
opposite direction according to the yaw angle when the vehicle is yawing, to make it go back
to the expected direction
(if the steering wheel is not return-to-center in the "Lock mode", it
will be the same as the "Normal mode")
.
[Steering Gain]: Used to change the sensitivity of the mixing direction.
[Throttle Gain]: Used to change the mixing throttle sensitivity.
[Priority]: Used to set the control ratio between steering wheel control and gyroscope in the
steering, i.e., turning radius. In direction turning by using the steering wheel, the steering angle
will be reduced due to the influence of gyroscope mixing. When the value is 0%, the mixing
control is the strongest, that is, the turning radius is the largest. When the value is 100%, the
mixing control is 0, that is, the turning radius is the smallest.
[Gyroscope calibration]: Used for the first time to enable the gyroscope via binding or
gyroscope calibration required after replacement.The model keeps a stable and stationary
state. Click calibration. The receiver flashes twice and exits automatically. This indicates that
the calibration is successful.
(The above are the adjustable parameters when the transmitter is adapted to the GMr receiver
and FS-GY01 gyroscope, and it is also adjustable when it is adapted to the INr4-GYB receiver.)
Note: Advanced function is added for 1.0.2 version firmware.
[Advanced]: To adapte INr4-GYB receiver compatible with model drift cars, etc. You can set
type of the model cars, and customize parameters for [ST Wheel Gain], [Damper Point],
[Damper] and [Filter].
•
[ST Wheel Gain]: Adjustment of intervention ratio of steering operation to gyro control, It is
more sensitive in the steering control when the value increases.
•
[Damper Point]: Adjusts the servo to the damper point in front of the target angle position.
In the damping interval, the servo oscillation speed will be slowed down. The higher the
value, the larger the interval in which the servo speed is slowed down.
•
[Damper]: Slow down the servo speed in the damper point, and adjust the damping effect
in the damper point. The higher the value, the slower the servo slowing down in the damper
point. As a result, it takes longer time for the servo to reach the target angle. This parameter
needs to be set together with [Damper point] to achieve the best result.
•
[Filter]: Used to suppress jitter. The higher the value, the stronger the jitter suppression.