





























ETEL Doc. - Operation & Software Manual # DSC2P 903 / Ver. F / 3/6/05
Chapter C: System functions
Operation & Software Manual
Direct Drives & Systems
159
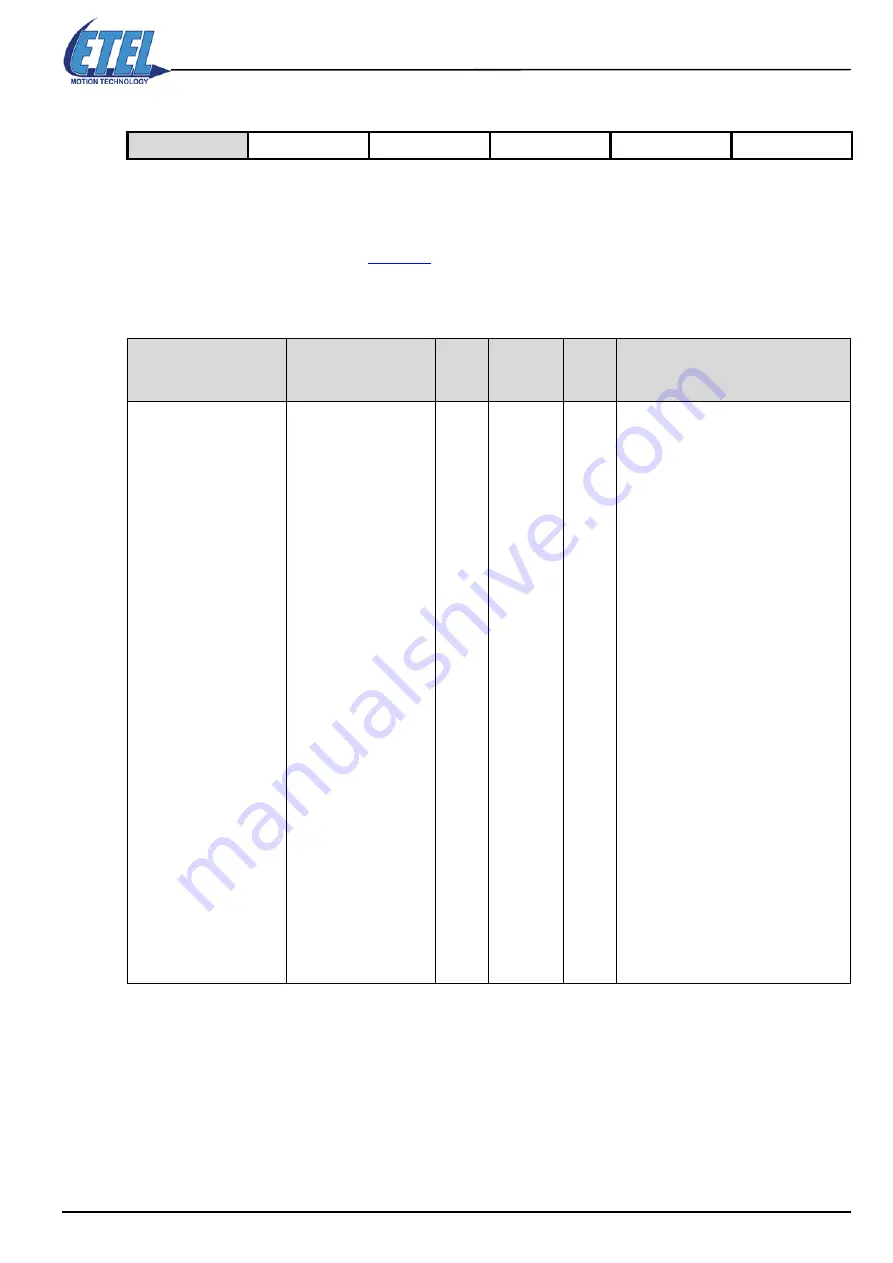
13.3.5 Start movements: STA and STI commands
These commands start a movement with movement parameters (alias of POS, SPD, ACC, JRT,... command)
stored at another depth than 0, as well as look-up table movements parameters stored at another depth than 0.
The
STI
command allows the user to start a movement according to the status of the digital input(s) defined by
parameters K160 and K161 (refer to
). As soon as the STI command is executed, the digital output(s)
are set to the state defined by parameters K162 and K163 (refer to the next §). A
SYNCHRO START
error
(M64=63) is sent to the controller if the movement does not start within the time-out defined by parameter K164
(time-out = K164 x 166.67
µ
s for the DSC2P/DSC2V or K164 x 500
µ
s for the DSCDP, DSCDL and DSCDM).
Note:
The depth where the movement characteristics are stored is defined in <p1>.
A mask of bits is used in <p2> to select which movement parameters are used among all
parameters present in the depth defined in <p1>.
If
<p2> value = 0
, the controller considers that
all <p2> bits = 1
(bits# 0-12: 8191 decimal)
Do not use
values 16 (bit 4) or 32 (bit 5) for <p2> of STA and STI commands.
Available on
DSC2P
DSC2V
DSCDP
DSCDL
DSCDM
Command format
Comments on
commands
<p1>
values
(depth)
<p2>
values
<p2>
bit #
Comments on bits mask <p2>
STA.<axis> = <p1>, <p2>
STI.<axis> = <p1>, <p2>
Starts a movement by
using the movement
parameters of the sub-
indexes (depth 1 to 3)
specified by <P1>, and
<P2> is a mask of the
movement parameter to be
loaded
Synchronous start (sti) of a
movement on an input by
using the movement
parameters of the sub-
indexes specified by <P1>,
and <P2> is a mask to
enable movement
variable to load
1 - 3
1
2
4
8
64
128
256
512
1024
2048
4096
0
1
2
3
6
7
8
9
10
11
12
Gets target position (POS = K210) from the
specified index. Also possible during a
trapezoïdal movement if MMC=1.
Gets profile velocity (SPD = K211) from the
specified index. Also possible during a
trapezoïdal movement if MMC=1.
Gets profile acceleration (ACC = K212)
from the specified index. Also possible
during a trapezoïdal movement if MMC=1.
Gets jerk filter time (JRT = K213) from the
specified index.
Gets profile type (MMD = K202) from the
specified index.
Gets user look-up table number (LTN =
K203) and the look-up table number
selection mode (parameter K207) from the
specified index.
Gets look-up table time (LTI = K204) from
the specified index.
Gets user amplitude for look-up table
(parameter K208) in mode K207=1.
Gets rotary movement type selection
(K209), only when the motor is not moving
(bit# 4 of SD1 at 0).
Gets the value of parameter K230 from the
specified index.
Gets the value of parameter K229 from the
specified index.
Содержание DSC Series
Страница 2: ...THIS PAGE IS INTENTIONALLY LEFT BLANK ...







































































