





























Operation & Software Manual
134
Direct Drives & Systems
Chapter C: System functions
ETEL Doc. - Operation & Software Manual # DSC2P 903 / Ver. F / 3/6/05
12.13 Stepper in open loop
It is possible to manage two or three-phase stepper motor in open loop which means that an encoder is not
needed. It is then not possible for the user to know if some steps have been lost or not and all the registers and
command referring to the real position cannot be used any more.
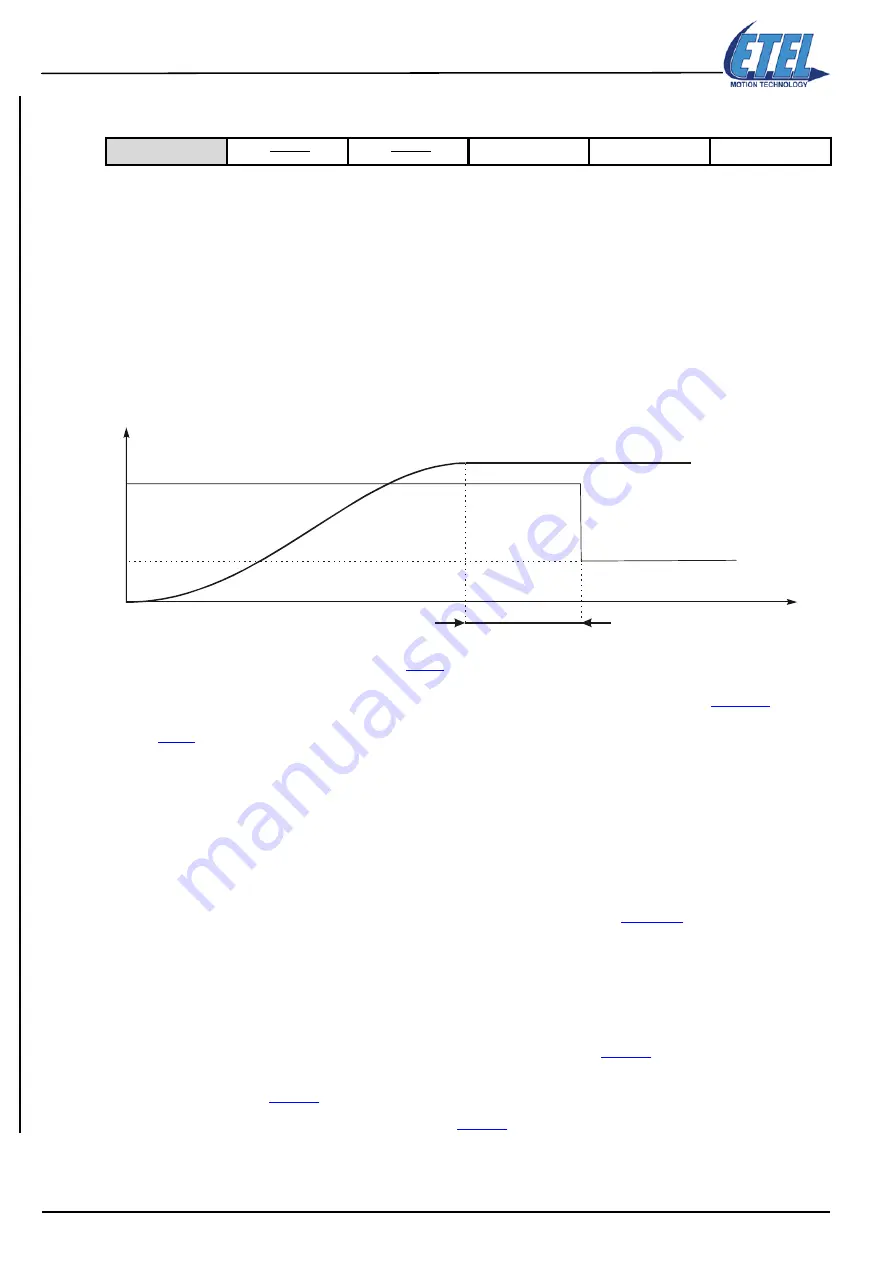
During the movement in standard reference mode (K61=1), a current called ’nominal current’ and set by
parameter K60 is injected into the phases of the motor to follow the theoretical trajectory. When the movement
is finished, another current called ’holding current’ and set by parameter K59 is injected into the phases of the
motor to keep the position. It means there is always current present in a stepper motor when it is powered on.
The holding current (parameter K59) must then be high enough to keep the position of the motor but not too
high to avoid higher temperature in the phases of the motor.
At the end of the theoretical trajectory, it is possible to set a stabilization time with parameter K194 before
changing from parameter K60 to parameter K59.
In standard reference mode (K61=1, refer to
for more information), a filter on the current reference set
by parameter K9 allows the user to have smooth current changes. The current is injected into the motor as
soon as the motor is in ’Power On’ (PWR.<axis>=1). The ’moving’ bit (bit# 4 of SD1, refer to
for more
information) is set to 1 during the movement and the stabilization time. In external reference mode (K61
≠
1,
for more information),
only
parameter K60 is taken into account and the user has to change its
value during the movement.
In one turn, the number of drive increment [dpi], given by parameter K55 is equal to 2048 x p with p is the
number of pairs of poles (this number of pairs of poles is given by parameter K54). Then, 1 dpi = 360°/(p x
2048) = 360°/(K54 x 2048).
• Phasing mode
The only phasing mode available with stepper in open loop is the phasing by constant current (K90=2) which
means that parameters K92, K93, K94 and K97 must be set correctly (Refer to
for more information).
During the phasing with stepper in open loop, the motor will move of maximum one magnetic period.
• Homing mode
The homing mode is normally used to define an absolute position. As there is no encoder used with stepper in
open loop, the only homing mode which can be used are as follows:
• Homing mode with limit switch: K40=2, 3, 6 and 7 (refer to
for more information)
• Homing mode with home switch: K40=4 and 5 if bit# 0 and 1 of parameter K58 are equal to 0
(refer to
for more information)
• Immediate homing: K40=22 (refer to
for more information)
Available on
DSC2P
DSC2V
DSCDP
DSCDL
DSCDM
Stabilization time (K194)
Theoretical trajectory
Current
Nominal current (K60)
Holding current (K59)
Time
Содержание DSC Series
Страница 2: ...THIS PAGE IS INTENTIONALLY LEFT BLANK ...







































































