

























GX8 Manipulator 1. Safety
GX series Rev.2
81
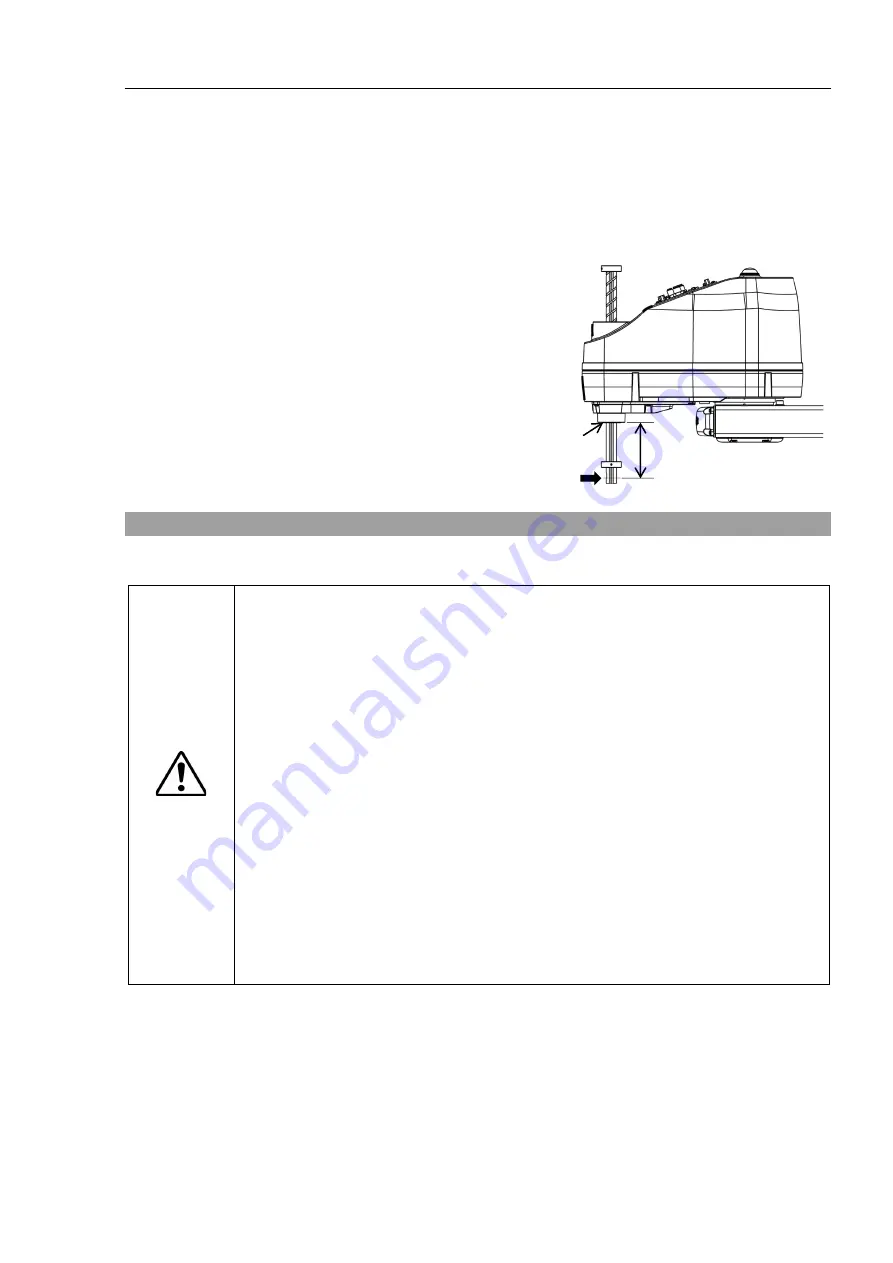
Strength of the Ball Screw Spline
If a load exceeding the allowable value is applied to the ball screw spline, it may not work
properly due to deformation or breakage of the shaft. If the ball screw spline is applied the
load exceeding the allowable value, it is necessary to replace the ball screw spline unit.
The allowable loads differ depending on distance where the load is applied to. For
calculating the allowable load, see the calculation formula below.
[Allowable bending moment]
GX8: M=27,000 N
∙
mm
Example: If 270 N load is applied
at 100 mm from
the end of the spline nut
[Moment]
M=F
∙
L
=
100
∙
270
=
27,000 N
∙
mm
End of the
spline nut
F
L
1.3 Operation Safety
The following items are safety precautions for qualified Operator personnel:
WARNING
■
Please carefully read the
Safety Manual
before operating the robot system.
Operating the robot system without understanding the safety precautions is
extremely hazardous and may result in serious bodily injury and/or severe
equipment damage to the robot system.
■
Do not enter the operating area of the Manipulator while the power to the robot
system is turned ON. Entering the operating area with the power ON is extremely
hazardous and may cause serious safety problems as the Manipulator may move
even if it seems to be stopped.
■
Before operating the robot system, make sure that no one is inside the
safeguarded area. The robot system can be operated in the mode for teaching
even when someone is inside the safeguarded area.
The motion of the Manipulator is always in restricted (low speeds and low power)
status to secure the safety of an operator. However, operating the robot system
while someone is inside the safeguarded area is extremely hazardous and may
result in serious safety problems in case that the Manipulator moves unexpectedly.
■
Immediately press the Emergency Stop switch whenever the Manipulator moves
abnormally while the robot system is operated.
Содержание SCARA GX Series
Страница 1: ...Original instructions Rev 2 EM221R5129F SCARA Robots GX series Manual ...
Страница 2: ...GX series Manual Rev 2 ...
Страница 12: ......
Страница 86: ...GX4 Manipulator 5 Motion Range 76 GX series Rev 2 ...
Страница 88: ......
Страница 188: ......
Страница 202: ......
Страница 211: ...Appendix B Time and Distance of Free Running in Emergency GX series Rev 2 201 GX4 A25 J3 Standard Boost ...
Страница 213: ...Appendix B Time and Distance of Free Running in Emergency GX series Rev 2 203 GX4 A30 J3 Standard Boost ...
Страница 215: ...Appendix B Time and Distance of Free Running in Emergency GX series Rev 2 205 GX4 A35 J3 Standard Boost ...
Страница 217: ...Appendix B Time and Distance of Free Running in Emergency GX series Rev 2 207 GX8 A45 J3 Standard Boost ...
Страница 219: ...Appendix B Time and Distance of Free Running in Emergency GX series Rev 2 209 GX8 A55 J3 Standard Boost ...
Страница 221: ...Appendix B Time and Distance of Free Running in Emergency GX series Rev 2 211 GX8 A65 J3 Standard Boost ...
Страница 224: ...Appendix C Time and Distance of Free Running When Safeguard Is Opened 214 GX series Rev 2 GX4 A25 J3 Standard Boost ...
Страница 226: ...Appendix C Time and Distance of Free Running When Safeguard Is Opened 216 GX series Rev 2 GX4 A30 J3 Standard Boost ...
Страница 230: ...Appendix C Time and Distance of Free Running When Safeguard Is Opened 220 GX series Rev 2 GX8 A45 J3 Standard Boost ...
Страница 232: ...Appendix C Time and Distance of Free Running When Safeguard Is Opened 222 GX series Rev 2 GX8 A55 J3 Standard Boost ...
Страница 234: ...Appendix C Time and Distance of Free Running When Safeguard Is Opened 224 GX series Rev 2 GX8 A65 J3 Standard Boost ...
Страница 236: ...Appendix D Accuracy Range of Arm Length Offset 226 GX series Rev 2 GX8 series GX8 A45 GX8 A55 GX8 A65 ...






































































