

















GX4 Manipulator 3. Environments and Installation
GX series Rev.2
29
3. Environments and Installation
Designing and installation of robot system shall be performed by personnel who has taken
robot system training held by us and suppliers, and should conform to all national and local
codes.
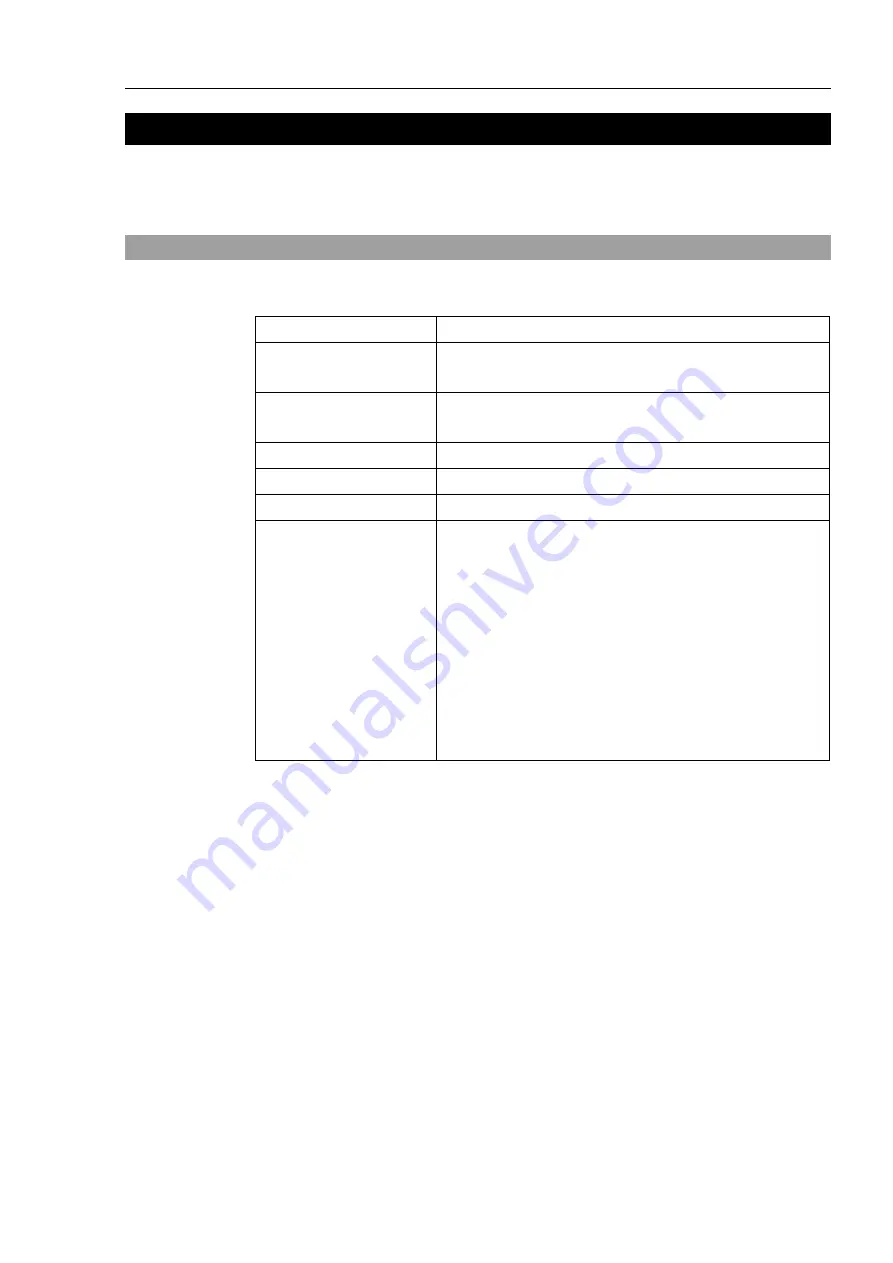
3.1 Environmental Conditions
A suitable environment is necessary for the robot system to function properly and safely. Be
sure to install the robot system in an environment that meets the following conditions:
Item
Conditions
Ambient temperature *
1
Installation: 5 to 40
°
C
Transportation or Storage:
−
20℃ to 60℃
Ambient relative humidity Installation: 10 to 80% (no condensation)
Transportation or Storage: 10 to 90% (no condensation)
Fast transient burst noise 1kV or less (signal wire)
Electrostatic noise
4kV or less
Altitude
2000m or less
Environment
- Install indoors
- Keep away from direct sunlight
- Keep away from dust, oily smoke, salinity, metal powder or
other contaminants
- Keep away from flammable or corrosive solvents and gases
- Keep away from water
- Keep away from shock or vibration
- Keep away from sources of electric noise
- Keep away from explosive area
- Keep away from a large quantity of radiation
Manipulators are not suitable for operation in harsh environments. When using
Manipulators in inadequate environments that do not meet the above conditions, please
contact the supplier of your region.
*
1
The ambient temperature conditions are for the Manipulators only. For the Controller
conditions, refer to the Controller manual.
When the product is used in a low temperature environment around the minimum
temperature of the product specification, or when the product is suspended for a long
time on holidays or at night, a collision detection error may occur due to the large
resistance of the drive unit immediately after the start of operation. In such a case, it is
recommended to warm up for about 10 minutes.
If there are conductive things such as fences or ladders within 2.5 m of the Manipulator,
ground the things.
NOTE
NOTE
NOTE
Содержание SCARA GX Series
Страница 1: ...Original instructions Rev 2 EM221R5129F SCARA Robots GX series Manual ...
Страница 2: ...GX series Manual Rev 2 ...
Страница 12: ......
Страница 86: ...GX4 Manipulator 5 Motion Range 76 GX series Rev 2 ...
Страница 88: ......
Страница 188: ......
Страница 202: ......
Страница 211: ...Appendix B Time and Distance of Free Running in Emergency GX series Rev 2 201 GX4 A25 J3 Standard Boost ...
Страница 213: ...Appendix B Time and Distance of Free Running in Emergency GX series Rev 2 203 GX4 A30 J3 Standard Boost ...
Страница 215: ...Appendix B Time and Distance of Free Running in Emergency GX series Rev 2 205 GX4 A35 J3 Standard Boost ...
Страница 217: ...Appendix B Time and Distance of Free Running in Emergency GX series Rev 2 207 GX8 A45 J3 Standard Boost ...
Страница 219: ...Appendix B Time and Distance of Free Running in Emergency GX series Rev 2 209 GX8 A55 J3 Standard Boost ...
Страница 221: ...Appendix B Time and Distance of Free Running in Emergency GX series Rev 2 211 GX8 A65 J3 Standard Boost ...
Страница 224: ...Appendix C Time and Distance of Free Running When Safeguard Is Opened 214 GX series Rev 2 GX4 A25 J3 Standard Boost ...
Страница 226: ...Appendix C Time and Distance of Free Running When Safeguard Is Opened 216 GX series Rev 2 GX4 A30 J3 Standard Boost ...
Страница 230: ...Appendix C Time and Distance of Free Running When Safeguard Is Opened 220 GX series Rev 2 GX8 A45 J3 Standard Boost ...
Страница 232: ...Appendix C Time and Distance of Free Running When Safeguard Is Opened 222 GX series Rev 2 GX8 A55 J3 Standard Boost ...
Страница 234: ...Appendix C Time and Distance of Free Running When Safeguard Is Opened 224 GX series Rev 2 GX8 A65 J3 Standard Boost ...
Страница 236: ...Appendix D Accuracy Range of Arm Length Offset 226 GX series Rev 2 GX8 series GX8 A45 GX8 A55 GX8 A65 ...



































































