



























GX4 Manipulator 5. Motion Range
72
GX series Rev.2
5.3 Setting the Cartesian (Rectangular) Range in the XY
Coordinate System of the Manipulator
(Joints #1 and #2)
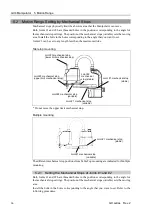
Use this method to set the upper and lower limits of the X and Y coordinates.
This setting is only enforced by software. Therefore, it does not change the physical range.
The maximum physical range is based on the position of the mechanical stops.
EPSON
RC+
Set the XYLim setting on the [XYZ Limits] panel shown by selecting [Tools]-[Robot
Manager].
(You may also execute the XYLim command from the [Command Window].)
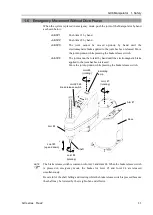
5.4 Standard Motion Range
The following “motion range” diagrams show the standard (maximum) specification.
When each Joint motor is under servo control, the center of the Manipulator shaft’s lowest
point moves in the areas shown in the figure.
“Area limited by mechanical stop” is the area where the center of shaft’s lowest point can
be moved when each joint motor is not under servo control.
“Mechanical stop” sets the limited motion range so that the Manipulator cannot move
beyond the area mechanically.
“Maximum space” is the area that contains the farthest reach of the arms. If the maximum
radius of the end effector is over 60 mm, add the “Area limited by mechanical stop” and
“radius of the end effector”. The total value is specified as the maximum area.
Содержание SCARA GX Series
Страница 1: ...Original instructions Rev 2 EM221R5129F SCARA Robots GX series Manual ...
Страница 2: ...GX series Manual Rev 2 ...
Страница 12: ......
Страница 86: ...GX4 Manipulator 5 Motion Range 76 GX series Rev 2 ...
Страница 88: ......
Страница 188: ......
Страница 202: ......
Страница 211: ...Appendix B Time and Distance of Free Running in Emergency GX series Rev 2 201 GX4 A25 J3 Standard Boost ...
Страница 213: ...Appendix B Time and Distance of Free Running in Emergency GX series Rev 2 203 GX4 A30 J3 Standard Boost ...
Страница 215: ...Appendix B Time and Distance of Free Running in Emergency GX series Rev 2 205 GX4 A35 J3 Standard Boost ...
Страница 217: ...Appendix B Time and Distance of Free Running in Emergency GX series Rev 2 207 GX8 A45 J3 Standard Boost ...
Страница 219: ...Appendix B Time and Distance of Free Running in Emergency GX series Rev 2 209 GX8 A55 J3 Standard Boost ...
Страница 221: ...Appendix B Time and Distance of Free Running in Emergency GX series Rev 2 211 GX8 A65 J3 Standard Boost ...
Страница 224: ...Appendix C Time and Distance of Free Running When Safeguard Is Opened 214 GX series Rev 2 GX4 A25 J3 Standard Boost ...
Страница 226: ...Appendix C Time and Distance of Free Running When Safeguard Is Opened 216 GX series Rev 2 GX4 A30 J3 Standard Boost ...
Страница 230: ...Appendix C Time and Distance of Free Running When Safeguard Is Opened 220 GX series Rev 2 GX8 A45 J3 Standard Boost ...
Страница 232: ...Appendix C Time and Distance of Free Running When Safeguard Is Opened 222 GX series Rev 2 GX8 A55 J3 Standard Boost ...
Страница 234: ...Appendix C Time and Distance of Free Running When Safeguard Is Opened 224 GX series Rev 2 GX8 A65 J3 Standard Boost ...
Страница 236: ...Appendix D Accuracy Range of Arm Length Offset 226 GX series Rev 2 GX8 series GX8 A45 GX8 A55 GX8 A65 ...







































































