





























6 Viewers
User Manual
112
6.2.2.
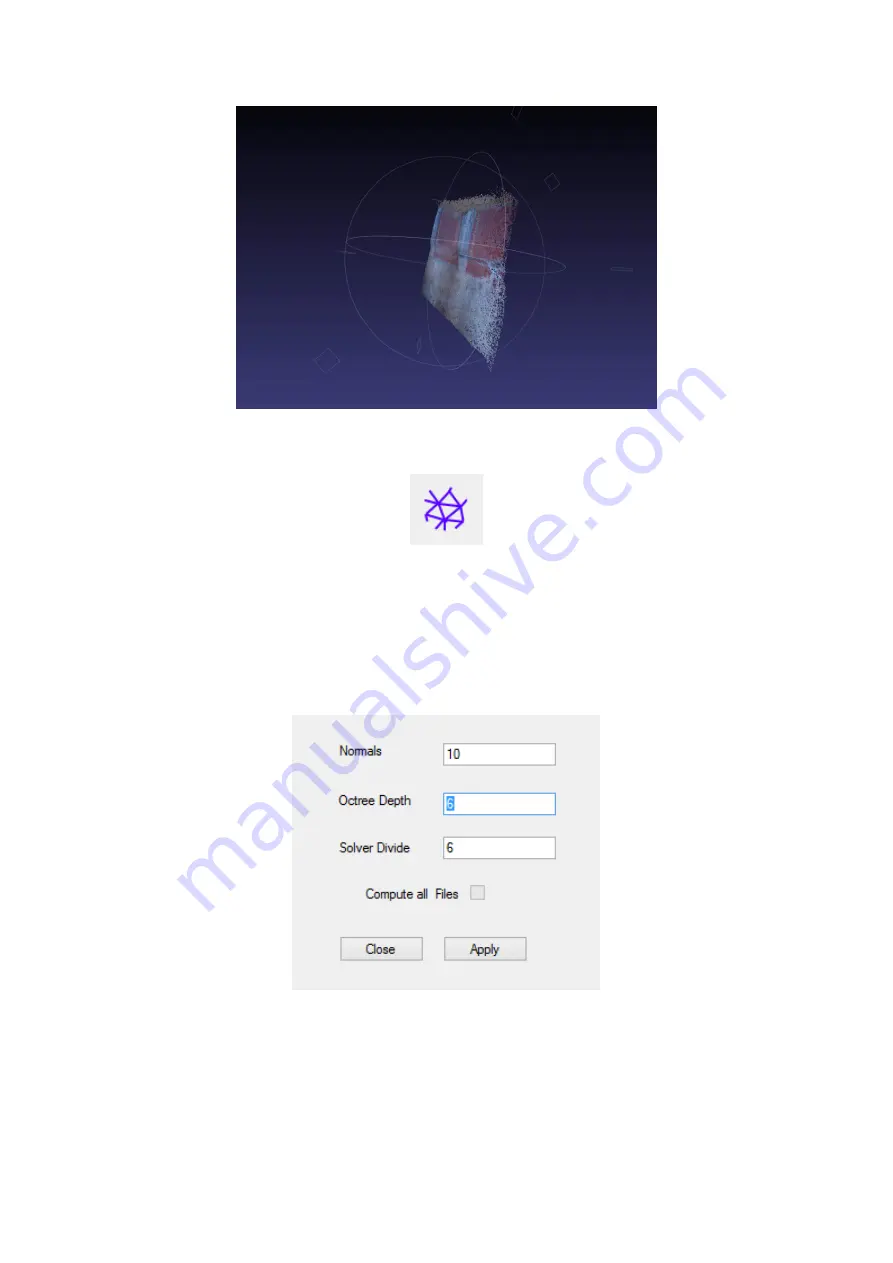
Create Mesh
This filter generates a mesh from the selected point cloud. Based on the point cloud
and the normals, a surface is created using the approach mentioned in the article
"Poisson Surface Reconstruction."
When this filter is selected, the following popup configuration window appears:
“
Normals
” Field: C
alculates the normals of the point cloud depending on the
neighbours. A high value for this parameter improves results but slows down
processing. A value between 10 and 1000 is recommended.
“
Octree Depth
”
and
“
Solver Divide
” fields: T
hese two fields are recommended to be set
high in the event that the point cloud which is going to be filtered is relatively clean
Содержание eyesmap
Страница 1: ...USER MANUAL EYESMAP Version 1 0 Revision A June 2015...
Страница 9: ...2 Technical Specifications In this chapter we shall see Tablet Cameras Depth Sensor GPS IMU 2...
Страница 108: ...6 Viewers In this chapter we shall see MeshLab Touch Filters o Remove Outliers o Create Mesh o Clean Noise 6...
Страница 118: ...7 Practical cases User Manual 118 Medium Object...
Страница 119: ...7 Practical cases User Manual 119 Small Object...
Страница 120: ...7 Practical cases User Manual 120 7 1 1 2 Photo Development and Management...
Страница 121: ...7 Practical cases User Manual 121 Small Objects...
Страница 126: ...7 Practical cases User Manual 126 9 Orientation Points...
Страница 129: ...7 Practical cases User Manual 129 Click on Confirm...
Страница 130: ...7 Practical cases User Manual 130 The distance of the stereoTarget will be saved Click on Next...
Страница 134: ...7 Practical cases User Manual 134...
Страница 191: ...7 Practical cases User Manual 191...







































































