





























185
Chapter 7- Multi-purpose application
POWERXL DM1 SERIES VARIABLE FREQUENCY DRIVES
MN040049EN—September 2021 www.eaton.com
Table 60. Drive control (Cont.).
P4.2.2
ab
DC brake current
ID 254
Minimum value:
DriveNomCurrCT*15/100
A
Maximum value:
DriveNomCurrCT*15/10
A
Default value:
DriveNomCurrCT*1/2 A
Description:
Defines the current level injected into the motor during DC-braking.
P4.2.3
ab
Start DC brake time
ID 263
Minimum value:
0.00 s
Maximum value:
600.00 s
Default value:
0.00 s
Description:
This parameter defines the time the drive injects DC braking current before starting to ramp. This can be used to stop motors that are
potentially spinning before a run command is giv
en or bef
ore ramping to reference level. This is to stop motors that are potentially
spinning before a run command is given.
P4.2.4
ab
Stop DC brake frequency
ID 262
Minimum value:
0.10 Hz
Maximum value:
10.00 Hz
Default value:
1.50 Hz
Description:
During a ramp to stop, this parameter defines the output frequency to be below to begin DC braking.
P4.2.5
ab
Stop DC brake time
ID 255
Minimum value:
0.00 s
Maximum value:
600.00 s
Default value:
0.00 s
Description:
Determines the length of DC braking while stopping.
0.00 = DC brake is not used; or
>0.0 = The amount of time DC-braking will occur after falling below the stop DC brake frequency.
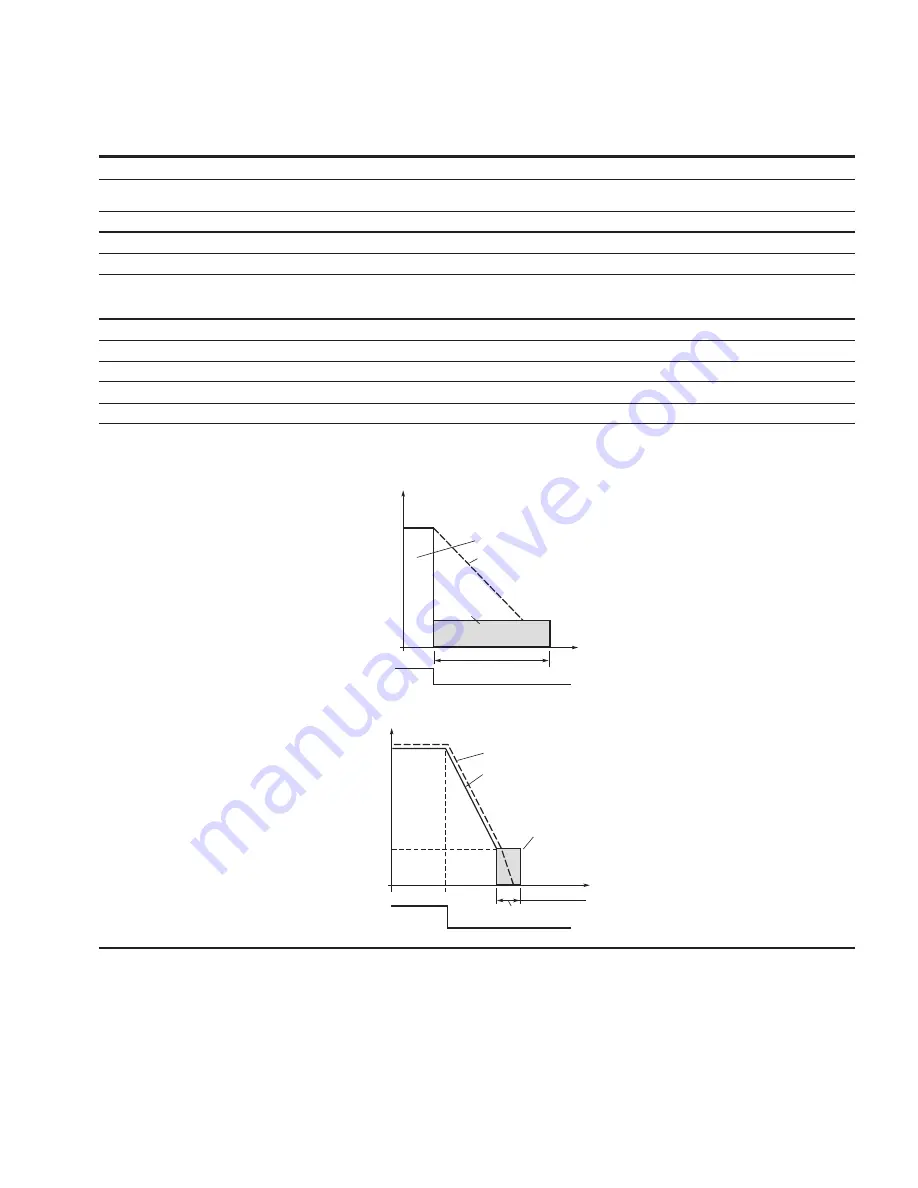
DC braking time when stop mode = coasting.
DC braking time when stop mode = ramp.
t
fout
Output Frequency
Motor Speed
DC Braking ON
Run
Stop
t = 1 x Stop DC Brake Time
t
Output Frequency
Motor Speed
DC-Braking
Run
Stop
P14.3
t = Stop DC Brake Time
fout