





























ASDA-A User Manual
Chapter 3 Configuration and Wiring
© DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
4th Edition 2005/11/30, HE03
3-17
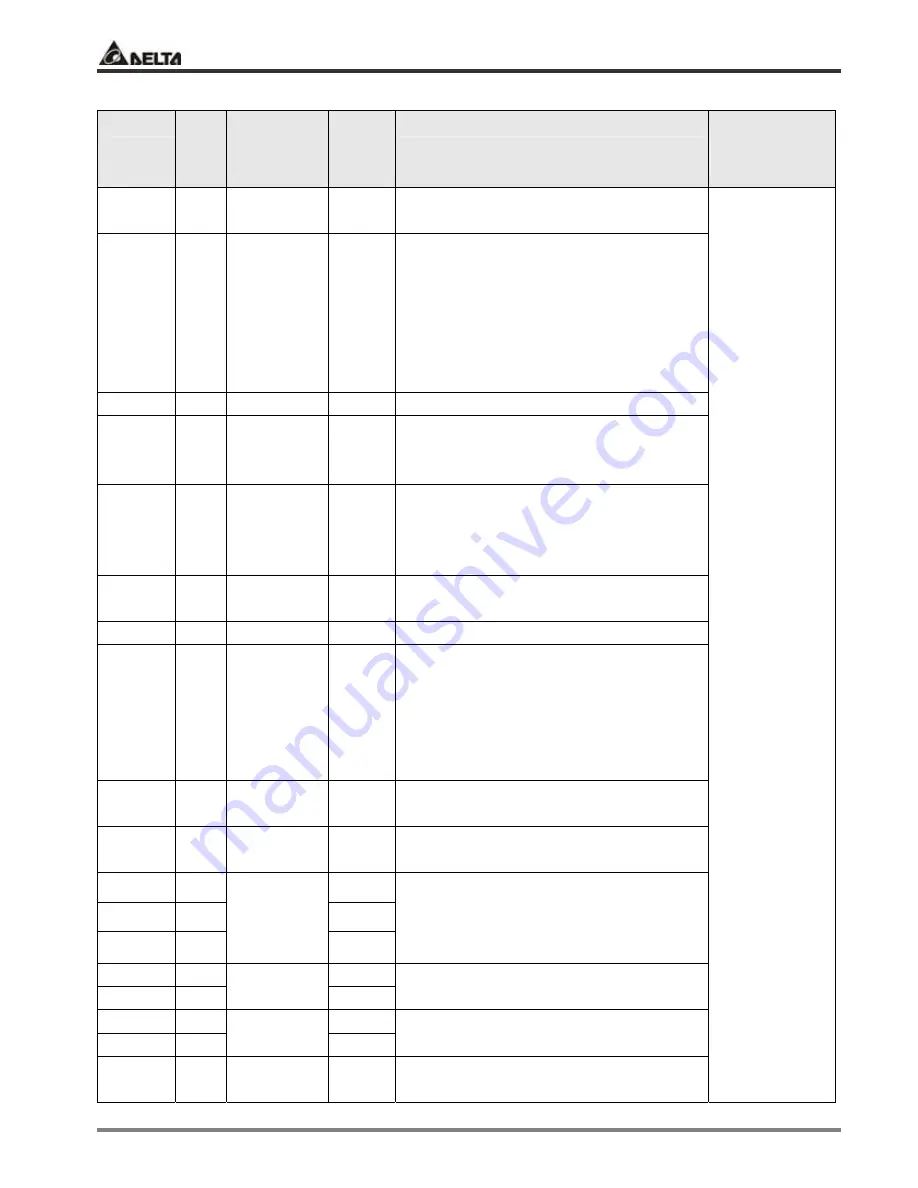
Table 3.D
Digital Input Functions
DI Signal
DI
Code
Assigned
Control
Mode
Pin No.
(Default)
Details
(*2)
Wiring Diagram
(Refer to 3-3-3)
SON 01
ALL
9
Servo On. Switch servo to "Servo Ready".
Check parameter P2-51.
ARST
02
ALL
33
A number of Faults (Alarms) can be cleared
by activating ARST. Please see table 10-3 for
applicable faults that can be cleared with the
ARST command. However, please
investigate Fault or Alarm if it does not clear
or the fault description warrants closer
inspection of the drive system.
GAINUP 03
ALL
- Gain
switching
CCLR
04
Pt
10
When CCLR is activated the setting is
parameter P2-50 Pulse Clear Mode is
executed.
ZCLAMP
05
ALL
-
When this signal is On and the motor speed
value is lower than the setting value of
P1-38, it is used to lock the motor in the
instant position while ZCLAMP is On.
CMDINV
06
Pr, T, S
-
When this signal is On, the motor is in
reverse rotation.
HOLD
07
Not assigned
Internal position control command pause
CTRG 08
Pr,
Pr-S, Pr-T
10
When the drive is in Pr mode and CTRG is
activated, the drive will command the motor
to move the stored position which
correspond the POS 0, POS 1, POS 2
settings. Activation is triggered on the rising
edge of the pulse.
TRQLM
09
S, Sz
10
ON indicates the torque limit command is
valid.
SPDLM
10
T, Tz
10
ON indicates the speed limit command is
valid.
POS0 11
34
POS1 12
8
POS2 13
Pr, Pr-S, Pr-T
-
When the Pr Control Mode is selected the 8
stored positions are programmed via a
combination of the POS 0, POS 1, and POS
2 commands. See table 3.E.
SPD0 14
34
SPD1 15
S, Sz, Pt-S,
Pr-S, S-T
8
Select the source of speed command:
See table 3.F.
TCM0 16
34
TCM1 17
Pt, T, Tz, Pt-T
Pr-T, S-T
8
Select the source of torque command:
See table 3.G.
S-P
18
Pt-S, Pr-S
31
Speed / Position mode switching
OFF: Speed, ON: Position
C9/C10







































































