





























1-53 Model Shift Frequency
Range:
Function:
With this parameter it is possible to
make an adjustment of the shifting
point where FC 302 changes
between Flux model 1 and Flux
model 2, which is useful in some
sensitive speed and torque control
applications.
P 1-53
130BA146.11
f
out
f
N,M
x 0.125
f
N,M
x 0.1
Flux model 2
Flux model 1
Figure 3.2
1-00 Configuration
Mode
= [1] Speed closed-loop or
[2] Torque and
1-01 Motor Control
Principle
= [3] Flux w/motor
feedback
Variable Current - Flux model -
Sensorless
This model is used when
1-00 Configuration Mode
is set to
Speed open-loop
[0] and
1-01 Motor
Control Principle
is set to
Flux
sensorless
[2].
In speed open-loop in flux mode,
the speed is determined by the
current measurement.
Below f
norm
x 0.1, the Adjustable
frequency drive runs on a variable
current model. Above f
norm
x 0.125
the Adjustable frequency drive runs
on a flux model.
P 1-53
130BA147.10
x 0.1
Variable
current
model
Flux model 2
f
out
f
N,M
f
N,M
x 0.125
Figure 3.3
1-00 Configuration
Mode
= [0] Speed open-loop,
1-01 Motor Control Principle
= [2]
Flux sensorless
1-54 Voltage reduction in fieldweakening
Range:
Function:
0 V
*
[0 - 100
V]
The value of this parameter will reduce the
maximal voltage available for the flux of the
1-54 Voltage reduction in fieldweakening
Range:
Function:
motor in fieldweakening, giving more voltage
available for torque. Be aware that a value that
is too high may cause stalling problems at high
speed.
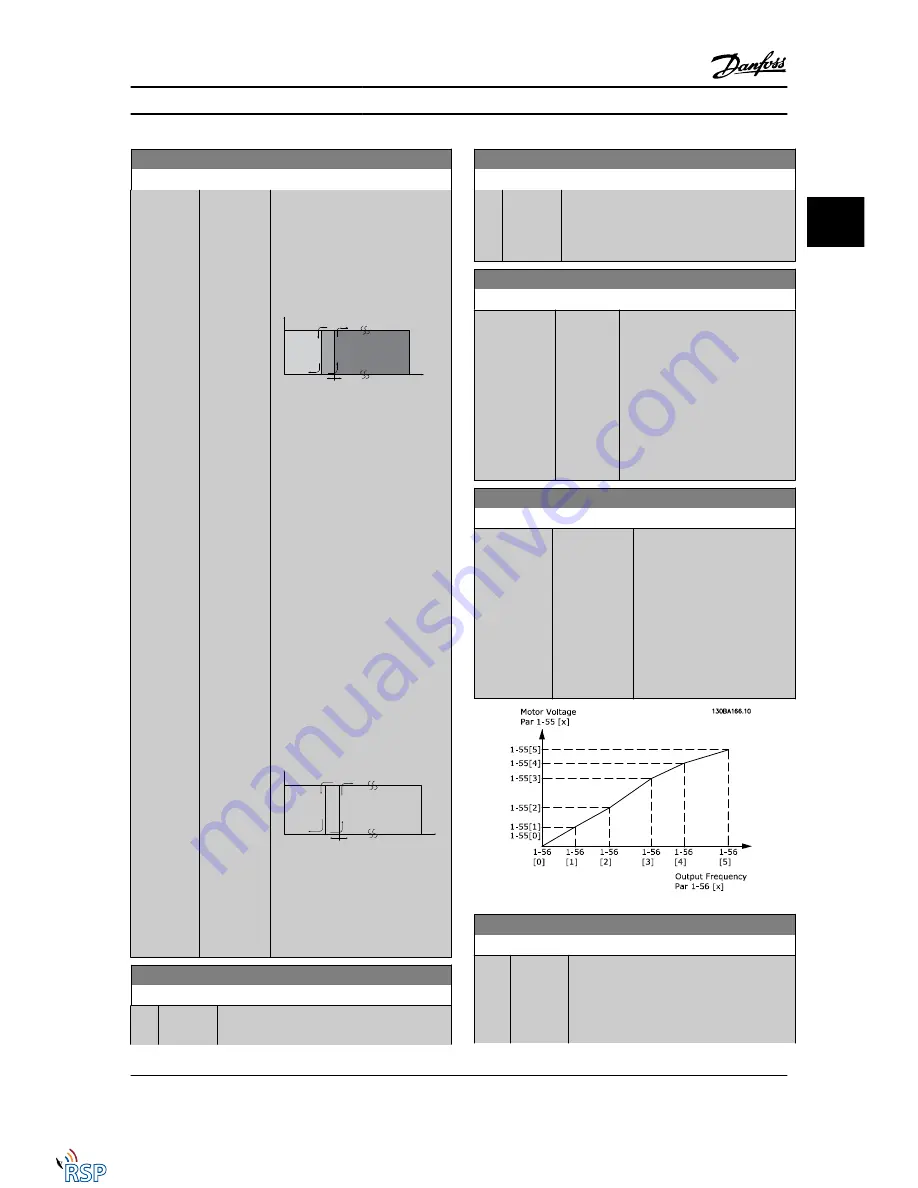
1-55 U/f Characteristic - U
Range:
Function:
Application
dependent
*
[0.0 -
1000.0 V]
Enter the voltage at each
frequency point to manually form a
U/f characteristic matching the
motor.
The frequency points are defined
in
1-56 U/f Characteristic - F
.
This parameter is an array
parameter [0-5] and is only
accessible when
1-01 Motor Control
Principle
is set to
U/f
[0].
1-56 U/f Characteristic - F
Range:
Function:
Application
dependent
*
[Application
dependant]
Enter the frequency points to
manually form a U/f-charac-
teristic matching the motor.
The voltage at each point is
defined in
1-55 U/f Characteristic
- U
.
This parameter is an array
parameter [0-5] and is only
accessible when
1-01 Motor
Control Principle
is set to
U/f
[0].
1-58 Flystart Test Pulses Current
Range:
Function:
30 %
*
[0 - 200
%]
Control the percentage of the magnetizing
current for the pulses used to detect the
motor direction. Reducing this value will
reduce the generated torque. 100% means
nominal motor current. The parameter is
Parameter Descriptions
FC 300 Programming Guide
MG33MD22 - VLT
®
is a registered Danfoss trademark
3-19
3
3
Remote Site Products - 1-888-532-2706 - www.remotesiteproducts.com
http://www.remotesiteproducts.com/p-20872-Danfoss-131H4490-VLT-Automation-VT-Drive-VFD-FC302-460V-25-HP.aspx







































































