























ATLAS North America Proprietary
Sea Scan® ARC Explorer™ Manual
1 of 1
Page: 8
Issue: 4.2.1
2SFT1-0001
Manual
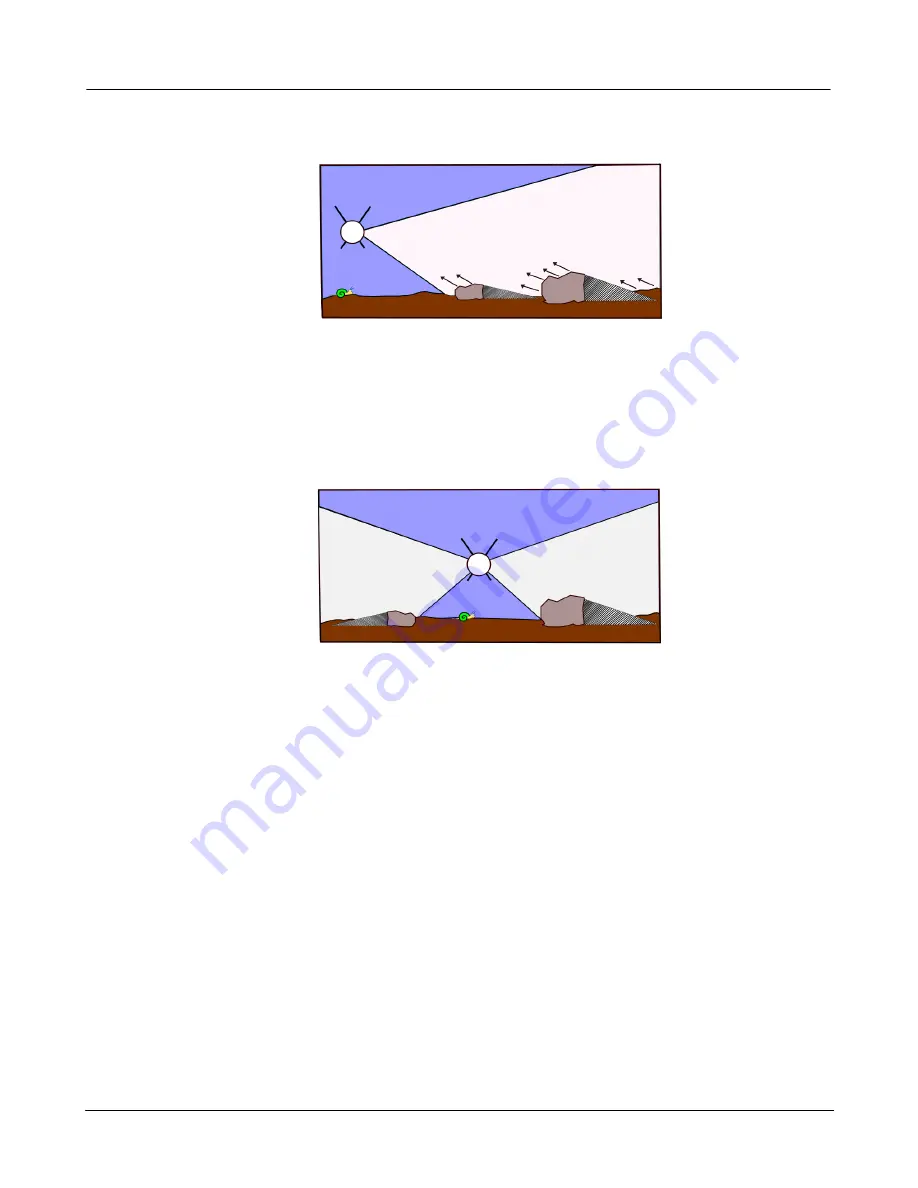
The system receives the returning echoes from the water column and seafloor shortly after emitting
a pulse.
Figure 4: The system picks up the returning echoes
Sea Scan Survey listens for a short amount of time, which is determined by the range; then it pings
again, thus beginning a new cycle.The returning echoes from one pulse are displayed on the sonar
window or waterfall as one single line, with dark and light portions of that line representing strong or
weak echoes relative to time. The stronger the sonar’s returning signal, the brighter the mark that
appears on the sonar window. The resulting accumulated lines then form a coherent picture of the
seafloor.
The two transducers provide information unique to their particular side of the system platform.
Figure 5: The transducers return info about their side of the system
In between the transducer beams is the system’s track immediately below the towfish. That center
display or water column loosely relates to the platform’s track. It communicates details about
objects encountered before the first bottom return and can include things such as surface returns,
debris, fish, and objects protruding from the sea floor.
The operator can view wide tracts of the seafloor because the transducers ping along the swath
width and the software records the strength of the echoes from the sea bottom. The system is
positioned just above the seafloor bottom. The transducers continuously emit narrowly focused
beams of sound perpendicular to the path of motion. The sound pulses pass through the water but
are reflected from the seafloor and objects, such as wreck sites that sit on the seafloor. The
computer records the echo signal strengths as they return and draws the entire sonar record line on
the screen. Thus, an image is built, line by line, as the sonar record line from each ping returns and
is drawn on the screen.
The quality of the sonar data will depend on operator and the data-gathering process, which
involves vessel course, tow speed, system altitude above the bottom, sea conditions, and range
settings. For example, a higher range setting yields a larger data sample with more of the seafloor
displayed; but the data will not have as high a resolution.