ARRIMOTION User’s Guide, 01/2004
Page 89 of 162
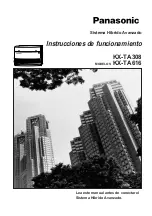
The Param(eter) Menu
Be careful when changing parameters in the conf menu since alteration of parameters can lead to
unintended movement, oscillation, instability or damage of an axis.
The following parameters of the selected axis can be configured here
- Homing Method selects the method which is used to figure out the absolute position.
Be careful to select a homing method that works with the selected axis.
- User Vel sets the velocity that can be governed by a mimic in percent of the
maximum axis velocity.
- User Acc sets the acceleration that can be governed by a mimic in percent of the
maximum axis acceleration.
- UPreRollAcc sets the maximum acceleration for the preroll. Do not set the preroll
acceleration to a smaller value than the user acceleration.
- UPostRollAcc sets the maximum acceleration for the postroll. Do not set the postroll
acceleration to a smaller value than the user acceleration.
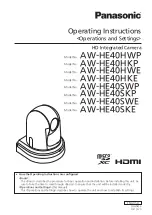
- MaxCurrent sets the maximum current for the LCB motors. 50% is a comparable
setting to the Lens Control System. This value will also be used as the trip level for
the coming by endstops.
- FWD Limit is the maximum position of an axis measured in encoder counts. Some
home methods set these limit during homing (all methods that are based on finding
two endstops and the panther lift axis)
- REV Limit is the minimum position of an axis measured in encoder counts. Some
home methods set these limit during homing (all methods that are based on finding
two endstops and the panther lift axis)
- Limit Tolerance in encoder ticks that a motor can overshoot the set limit. This
parameter is needed in the case that the detected travel of axis varies after a further
homing attempt.
- Error Limit is the maximum allowed Magnitude of the difference between
commanded and actual position in ticks that is tolerated by the system without
warning.
- Shut off Limit is the Magnitude of the difference between commanded and actual
position where a emergency shutoff is done by the axis controller
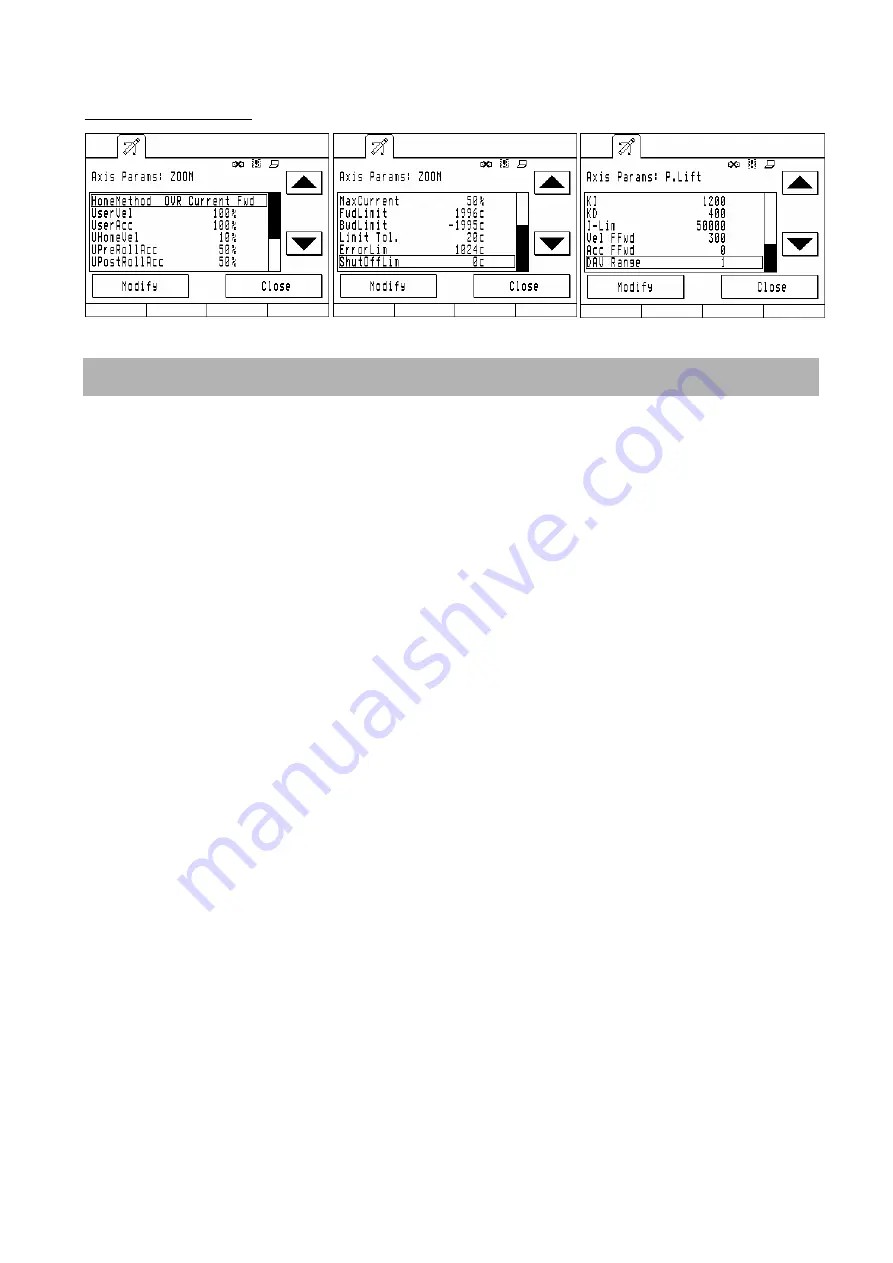
- KP Proportional term of the control loop (only on ACB-axes)
- KD Derivate term of the control loop (only on ACB-axes)
- KI Integral term of the control loop (only on ACB-axes)
- I Limit maximum magnitude of the integrator component in the summation term of the
control loop
- Vel FFWD Velocity feed forward term of the control loop (only on ACB-axes)
Содержание ARRIMOTION
Страница 2: ...ARRIMOTION User s Guide 01 2004 Page 2 of 162 This page has been intentionally left blank ...
Страница 5: ...ARRIMOTION User s Guide 01 2004 Page 5 of 162 ...
Страница 6: ...ARRIMOTION User s Guide 01 2004 Page 6 of 162 This page has been intentionally left blank ...
Страница 12: ...ARRIMOTION User s Guide 01 2004 Page 12 of 162 1 Introduction ...
Страница 21: ...ARRIMOTION User s Guide 01 2004 Page 21 of 162 This page has been intentionally left blank ...
Страница 22: ...ARRIMOTION User s Guide 01 2004 Page 22 of 162 2 Setup ...
Страница 37: ...ARRIMOTION User s Guide 01 2004 Page 37 of 162 3 Operation ...
Страница 57: ...ARRIMOTION User s Guide 01 2004 Page 57 of 162 ...
Страница 79: ...ARRIMOTION User s Guide 01 2004 Page 79 of 162 ...
Страница 80: ...ARRIMOTION User s Guide 01 2004 Page 80 of 162 4 Software Reference ...
Страница 120: ...ARRIMOTION User s Guide 01 2004 Page 120 of 162 5 Hardware Reference ...