
















《目次》 《索引》
TI 71M01D03-03
1st Edition : 2007.03.12-00
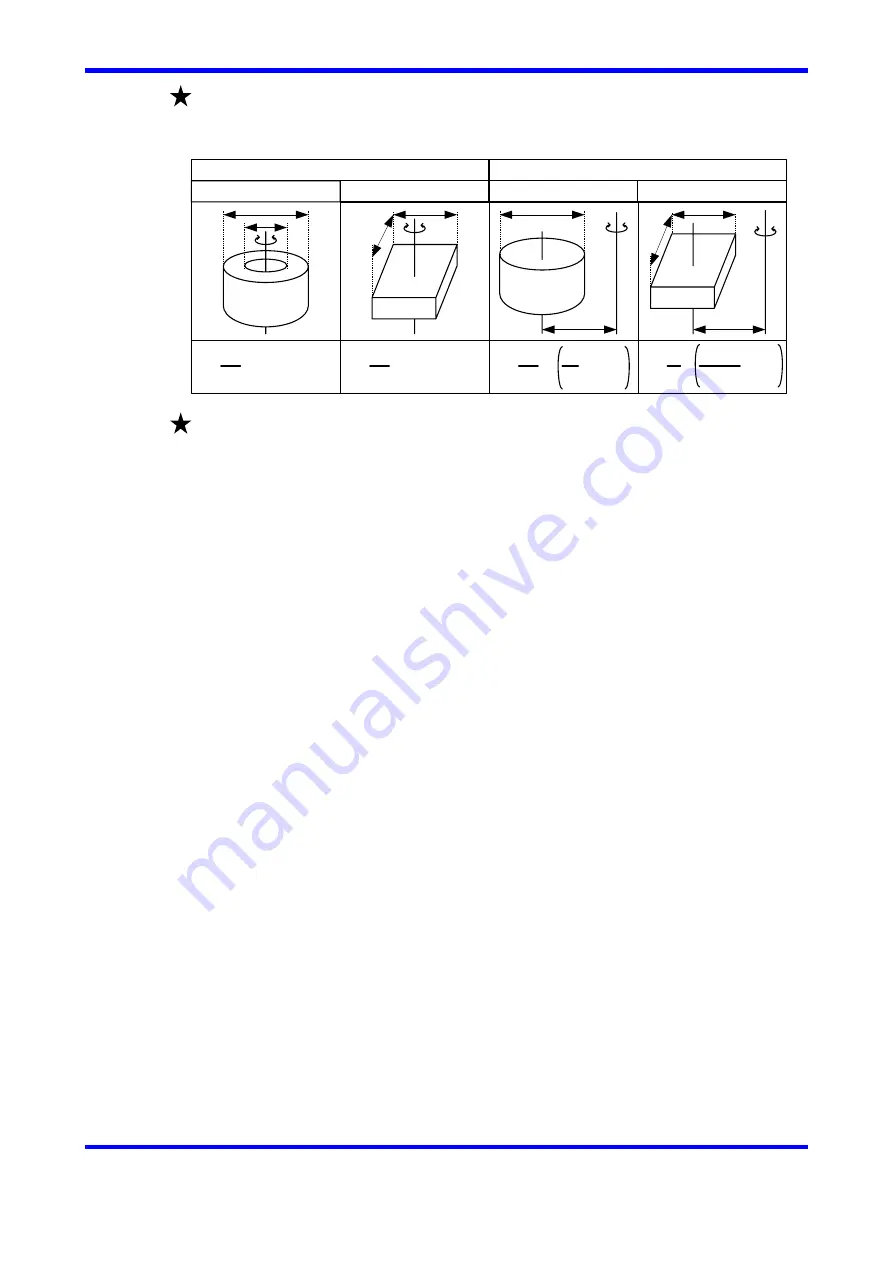
Moment inertia of load mounted to rotation motor (DYNASERV) [kg・m
2
]
Shapes and formulas are as below.
Load inertia
Column
Rectangle
Rectangle
Column
Axis go through center of gravity
Axis does not go through center of gravity
a
b
a
b
r
a
r
a
b
J=
1
8
M(a
2
+b
2
)
J=
1
12
M(a
2
+b
2
)
J=
1
4
M a
2
+4r
2
1
2
J=
1
4
a
2
+b
2
M +4r
2
3
Reboot
Power recycle, or restart drive by software reset command
付-2





















































