





























4
-6
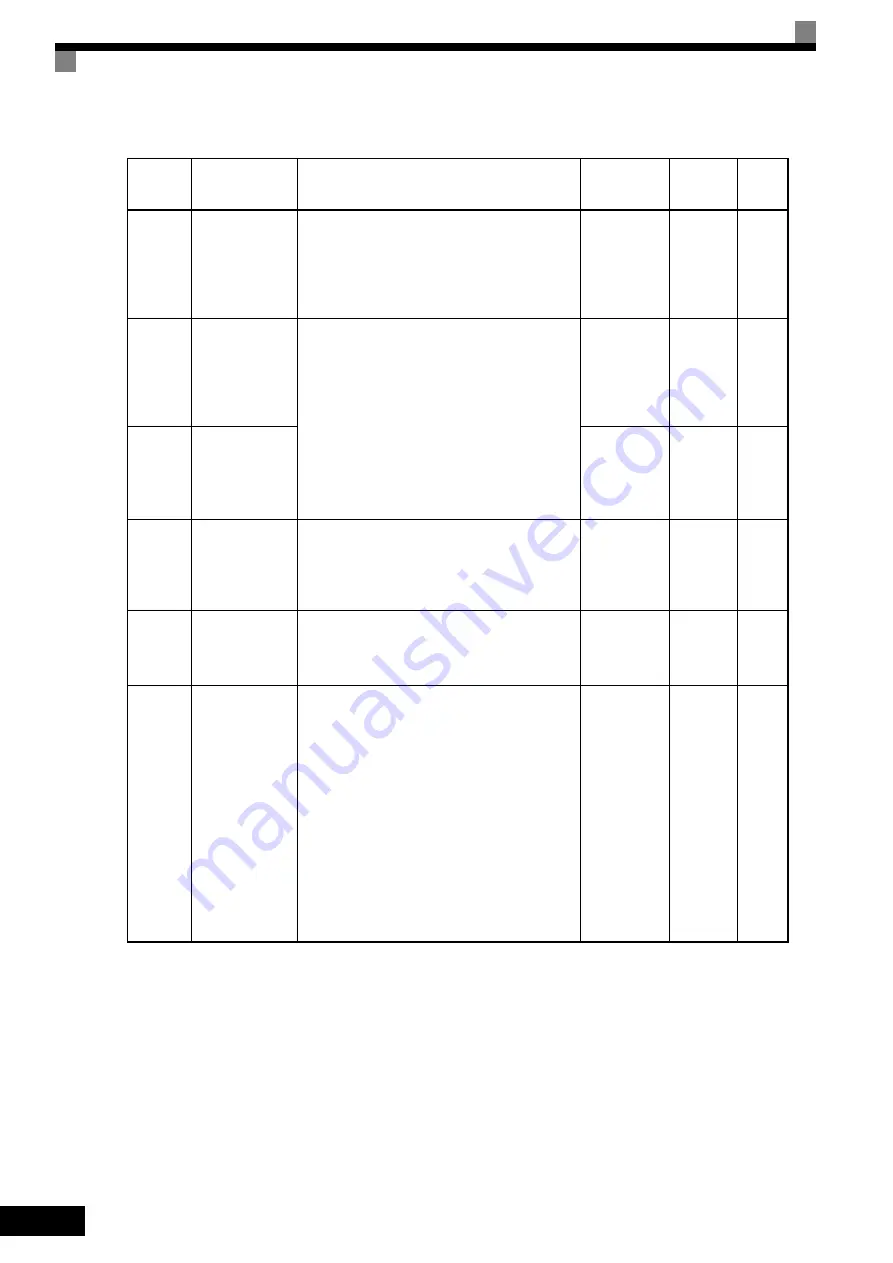
Table 4.2 Constants that Are Set as Required
Con-
stant
Number
Name
Description
Setting
Range
Factory
Setting
Page
b1-03
Stopping method
selection
Select stopping method when Stop Command is
sent.
0: Deceleration to stop
1: Coast to stop
2: DC braking stop
3: Coast to stop with timer
0 to 3
0
5-10
6-12
C6-02
Carrier fre-
quency selection
The carrier frequency is set low if the motor cable
is 50 m or longer or to reduce radio noise or leak-
age current.
1 to F
Depends
on capac-
ity, volt-
age, and
control
method.
5-26
C6-11
Carrier fre-
quency selection
for open-loop
vector 2 control
1 to 4
Depends
on kVA
setting.
5-26
d1-01 to
d1-04 and
d1-17
Frequency refer-
ences 1 to 4 and
jog frequency ref-
erence
Set the required speed references for multi-step
speed operation or jogging.
0 to 400.00 Hz
d1-01 to
d1-04:
0.00 Hz
d1-17:
6.00 Hz
5-27
H4-02
and H4-
05
FM and AM ter-
minal output gain
Set the voltage level gain for the multi-function
analog output 1 (H4-02) and 2 (H4-05).
Set the number of multiples of 10 V to be output as
the 100% output for the monitor item.
0.00 to 2.50
H4-02:
1.00
H4-05:
0.50
5-54
L3-04
Stall prevention
selection during
deceleration
0: Disabled (Deceleration as set. If deceleration
time is too short, a main circuit overvoltage
may result.)
1: Enabled (Deceleration is stopped when the
main circuit voltage exceeds the overvoltage
level. Deceleration restarts when voltage is
returned.)
2: Intelligent deceleration mode (Deceleration
rate is automatically adjusted so that the
Inverter can decelerate in the shortest possible
time. Set deceleration time is disregarded.)
3: Enabled (with Braking Resistor Unit)
When a braking option (Braking Resistor, Braking
Resistor Unit, Braking Unit) is used, always set to
0 or 3.
0 to 3
1
5-61
6-25







































































