




























4.2 Setup Procedure
4.2.5 Servo Commands to Use
4-8
Movement Direction after Changing to Position Control
during Speed Control, Torque Control, or Constant-Speed
Control
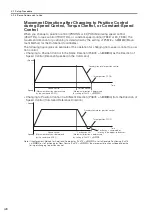
When you change to position control (POSING or EX_POSING) during speed control
(VELCTRL), torque control (TRQCTRL), or constant-speed control (FEED or EX_FEED), the
movement direction for positioning is determined by the setting of Pn87E = n.
X (Move-
ment Method for the Rotational Coordinates).
The following figure gives an example of the operation for changing from speed control to posi-
tion control.
•
Changing to Position Control in the Same Direction (Pn87E = n.
0) as the Direction of
Speed Control (Direction Specified in the Command)
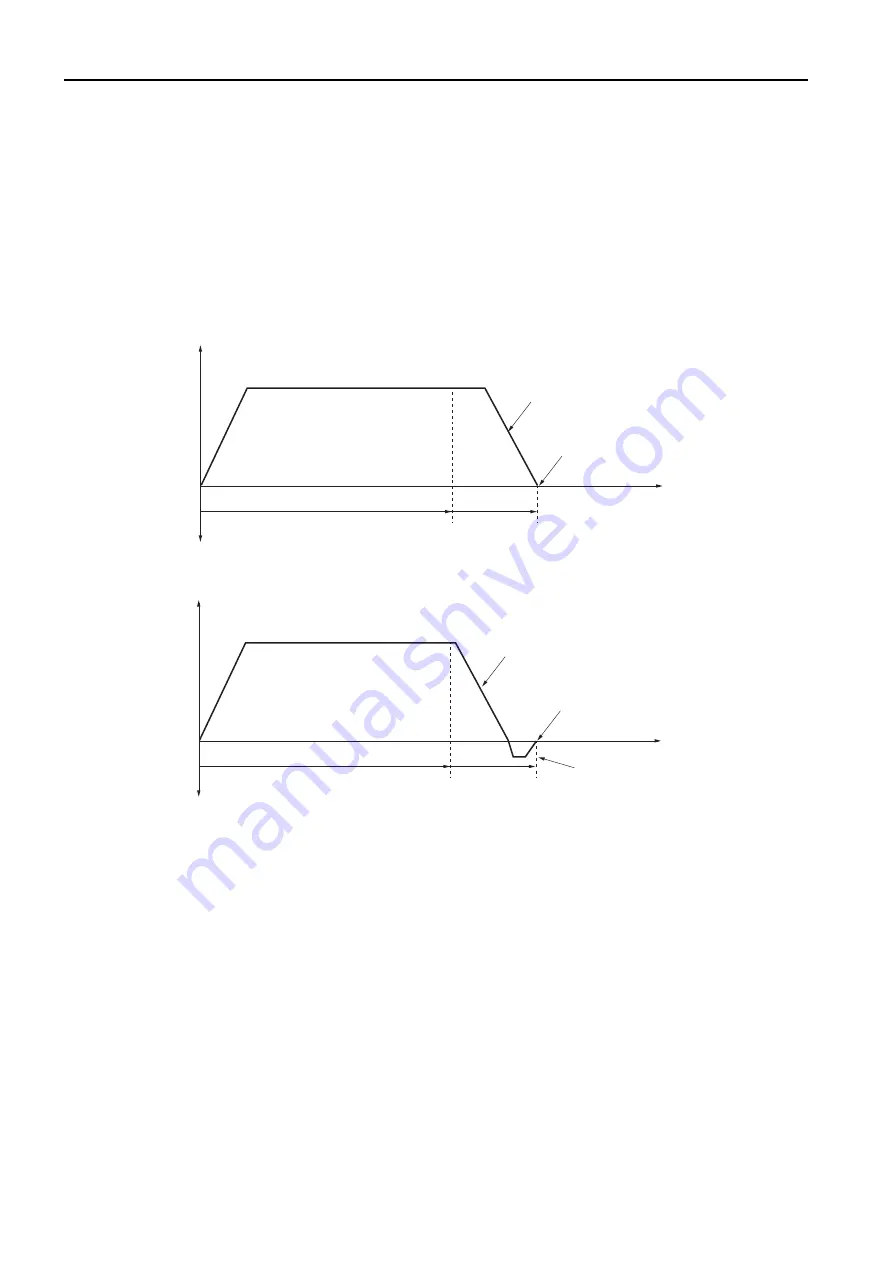
•
Changing to Position Control in a Different Direction (Pn87E = n.
0) from the Direction of
Speed Control (Command Reference Direction)
Note: If the Movement Method for Rotational Coordinates (Pn87E = n.
X) is set to Absolute Positioning (Pn87E
= n.
0) or to Positioning by Near Course (Pn87E = n.
3), the movement direction will depend on the
timing of changing to position control.
S
peed control
(Movement direction i
s
determined
by
s
etting of Pn87E = n.
0.)
Po
s
ition control
Target po
s
ition (TPO
S
)
Deceleration rate for po
s
ition control
Time
(Movement direction i
s
determined
by the command (VREF).)
-
S
peed
+
S
peed
S
peed control
(Movement direction i
s
determined
by
s
etting of Pn87E = n.
0.)
Po
s
ition control
Po
s
itioning i
s
completed by
moving in the oppo
s
ite direction.
Target po
s
ition (TPO
S
)
Deceleration rate for po
s
ition control
Time
(Movement direction i
s
determined
by the command (VREF).)
-
S
peed
+
S
peed