




















Chapter
2
Techncial Information
TiM3xx Detecting Laser Scanner
6
© SICK AG · Germany · All rights reserved · Subject to change without notice
8014318/YK97/2015-04-27
Operating principle of the TiM3xx
2
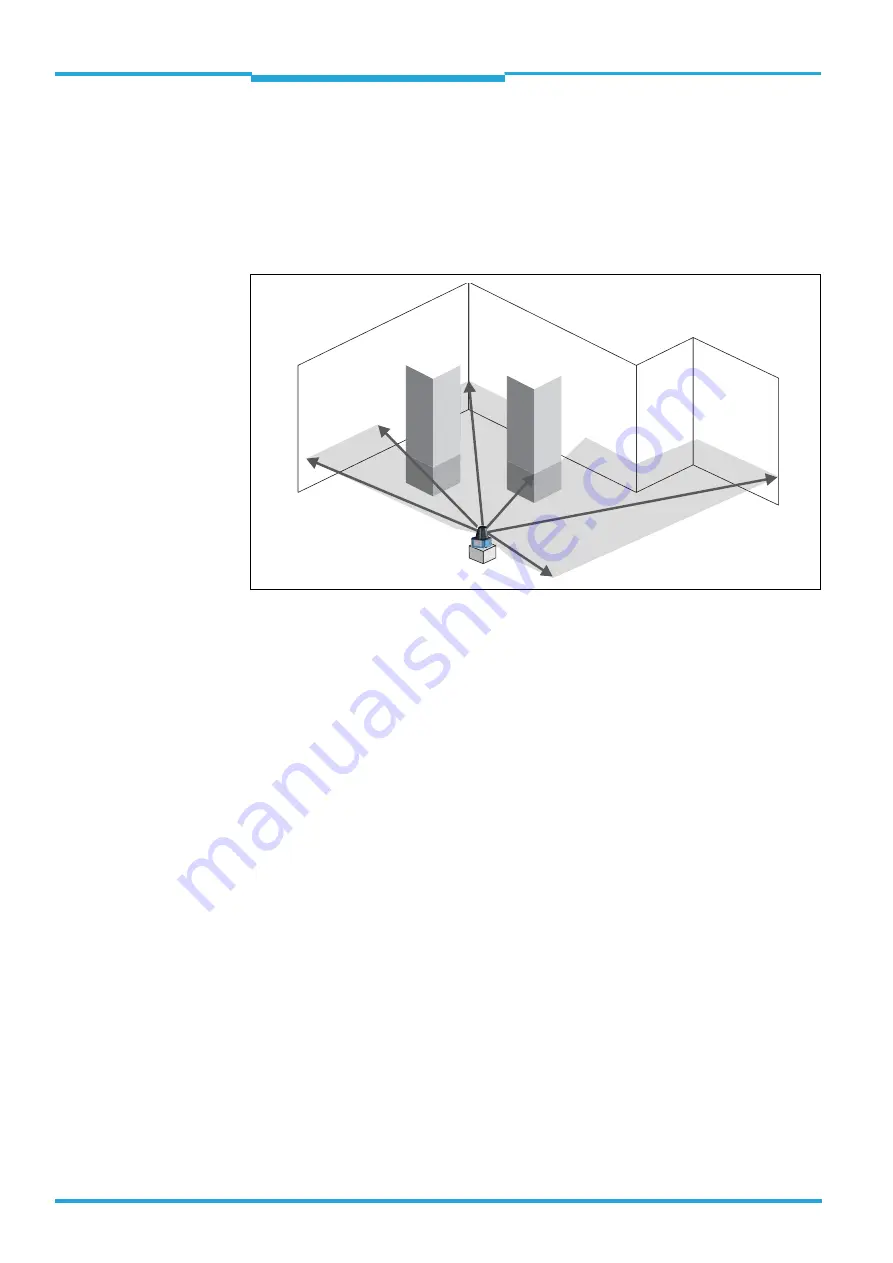
Operating principle of the TiM3xx
The TiM3xx is an opto-electronic laser scanner that electro-sensitively scans the perimeter
of its surroundings at a single plane with the aid of laser beams. The TiM3xx measures its
surroundings using two-dimensional polar coordinates based on its measurement origin.
This is marked on the hood in the centre using a circular indentation. If a laser beam hits
an object, its position in terms of distance and direction is determined.
Scanning is performed across a 270° sector. The maximum range of the TiM3xx is 4 m
(TiM31x/TiM32x) / 10 m (TiM35x/TiM36x) on light, natural surfaces with an object reflec-
tivity > 50% (e.g. a white house wall).
The scanning range is 2 m (TiM31x/TiM32x) /8 m (TiM35x/TiM36x) in the case of dark sur-
faces with remission of > 10%.
2.1
Distance measurement
The TiM3xx emits pulsed laser beams using a laser diode. If one of these laser pulses hits
an object or a person, this is reflected at its surface. The reflection is registered by a photo-
sensitive element in the TiM3xx receiver. The TiM3xx uses HDDM technology (
H
igh
D
efini-
tion
D
istance
M
easurement), a SICK own-development. With this measurement process, a
measured value is formed by adding together multiple single pulses. The TiM3xx calculates
the distance to the object from the transit time required by the light from emission of the
beam to receipt of the reflection. This principle of "time-of-flight measurement" is used by
radar systems in a similar manner.
2.2
Direction measurement
The emitted laser beams are deflected by the TiM3xx using a rotating mirror and its sur-
roundings scanned in a circular form. The measurements are triggered internally at regular
angle increments using an angular encoder.
The TiM3xx scans at a scanning frequency of 15 Hz. The measurement method forms an
average value from several pulses to determine individual measured values.
At an angle resolution of 1° (TiM31x/TiM32x/TiM35x) / 0.3°(TiM36x) , a measuring point
is formed from the average of 84 measurements. The spot geometry of the submeasuring
points is virtually circular whereas a measuring point has the form of a narrow rectangle due
to overlapping.





















































