























3-Finger Adaptive Robot Gripper Instruction Manual
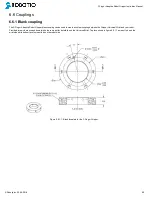
7.7 Gear replacement
Maintenance interval
Tools you need
Parts you need
2 M cycles or 1 year
l
2.0mm precision flat head screwdriver
l
Dry tissue or towel
l
Retaining ring (snap ring) pliers
l
Philips screwdriver
l
Replacement gear kit provided by Robotiq
(one kit for each Finger Gear to be
replaced)
l
Heavy strength thread-locker (
Loctite 263
)
See Spare Parts, Kits and Accessories section to order Robotiq 3-Finger Adaptive Robot Gripper replacement parts.
Note
Always turn off robot and Gripper power supply before performing maintenance operations on the Gripper.
Warning
Always wear protective glasses when doing maintenance work on the 3-Finger Adaptive Robot Gripper, especially when manipulating
snap rings.
Procedure
1.
Remove the Gripper from the robot following schematics in section 3.3 Mechanical connections.
2.
Clean the Gripper following instructions in 7.1 Gripper cleaning.
3.
Remove the Fingers B and C by :
a.
Removing the snap rings at the base of the fingers using the snap ring pliers.
b.
Gently pull the finger base axis, beware the finger will come off.
4.
Remove Finger A by :
a.
Removing the two (2) Palm Pad screws on each side of Finger A.
b.
Then remove the proximal axis by holding Finger A and inserting a screwdriver or Allen key in the hole on either side of the Finger A,
beware the finger will come off.
5.
On each Finger requiring replacement, remove the gear by unscrewing the three (3) 4-40 screws (note the gear orientation), discard the 4-40
screws and gear.
6.
Place the new gear in the previous position with exact orientation.
7.
Screw in the new gear using the new 4-40 screws, applying heavy strength
Loctite 263
.
©Robotiq inc. 2008-2018
90







































































