




























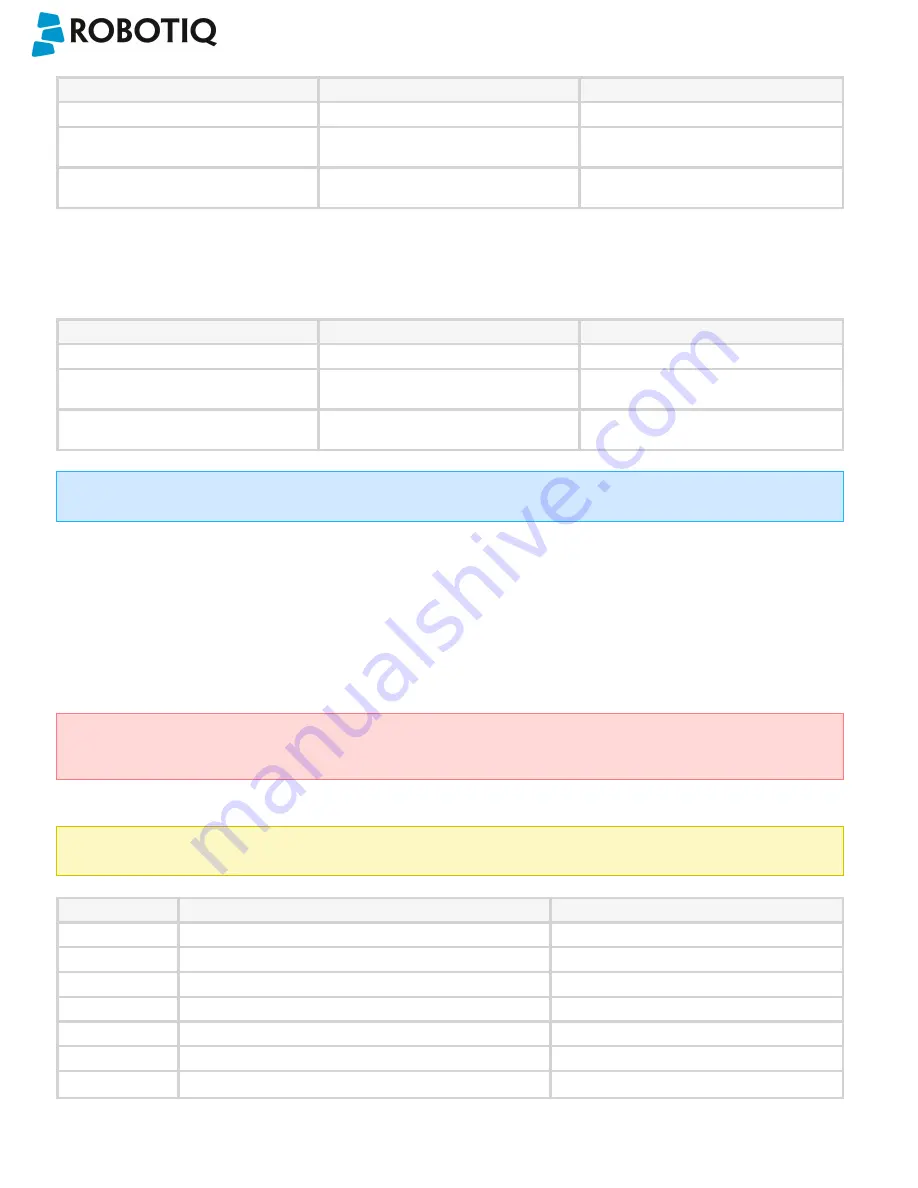
3-Finger Adaptive Robot Gripper Instruction Manual
COLOR
STATE
INFORMATION
Green
Off
Gripper is not supplied with power
Green
Blinking
The Gripper is correctly supplied and the
control board is running
Green
On
A network has been detected and at least one
connection is in the established state
4.2.3 Fault LED
COLOR
STATE
INFORMATION
Red
Off
No fault detected
Red
On
A minor fault occurred (or the Gripper
is booting)
Red
Blinking
A network has been detected and at least one
connection is in the established state
Info
A major fault refers to a situation where the Gripper must be reactivated.
4.3 Gripper register mapping
The 3-Finger Gripper firmware provides functionalities such as the direct position control of the fingers via "Go To" commands. There are also
additional advanced options, such as the individual control of the fingers or the Scissor Mode.
A Simplified Control Mode is available for users which do not intend to use the advanced option. Otherwise a register mapping for the Advanced Control
Mode containing all the Gripper functionalities is also provided. From the Gripper standpoint, there is no difference between the two modes. The Simple
Control Mode is only intended to ease usage of the Gripper for users who are only interested in basic functionalities.
Warning
When using the Simplified Control Mode, it is important to fill the unused registers with zeros. Neglecting to do so will result in the unwanted
triggering of control options and might lead to a hazardous behavior from the Gripper. Zero fill is 00 in hexadecimal or 00000000 in binary.
Register mapping for the Simplified Control Mode:
Caution
Byte numeration starts on zero and not at 1 for the functionalities and status registers.
REGISTER
ROBOT OUTPUT/FUNCTIONALITIES
ROBOT INPUT/STATUS
Byte 0
ACTION REQUEST
GRIPPER STATUS
Byte 1
00
OBJECT DETECTION
Byte 2
00
FAULT STATUS
Byte 3
POSITION REQUEST
POS. REQUEST ECHO
Byte 4
SPEED
FINGER A POSITION
Byte 5
FORCE
FINGER A CURRENT
Byte 6
00
NOT USED IN SIMPLE MODE
©Robotiq inc. 2008-2018
33




































































